一种四向磁驱动的柔性跳跃机器人及其使用方法
本发明属于柔性跳跃机器人的,尤其涉及一种四向磁驱动的柔性跳跃机器人及其使用方法。
背景技术:
1、柔性跳跃机器人在密闭场合、狭小空间、以及定位监测等方面都有广泛的需求。随着机器人技术的发展,人们对各种柔性机器人的运动性能提出了更高的要求,对机器人的驱动机制、方向性的要求也更为迫切。而目前提出的微型柔性机器人存在结构复杂不利于灵活操作或结构过于简单无法完成多向运动的问题,不能很好的结合操控便捷性与适用性。在这种形势下,具有四向磁驱动特性的柔性跳跃机器人无疑为机器人的灵活运动机制开辟了新道路。
技术实现思路
1、本发明目的在于提供一种四向磁驱动的柔性跳跃机器人及其使用方法,通过施加不同强度的磁场,可以触发柔性跳跃机器人不同方向的运动机制,从而实现四向驱动。以解决现有的柔性跳跃机器人不能实现四向驱动的技术问题。
2、为解决上述技术问题,本发明的具体技术方案如下:
3、一种四向磁驱动的柔性跳跃机器人,包括:
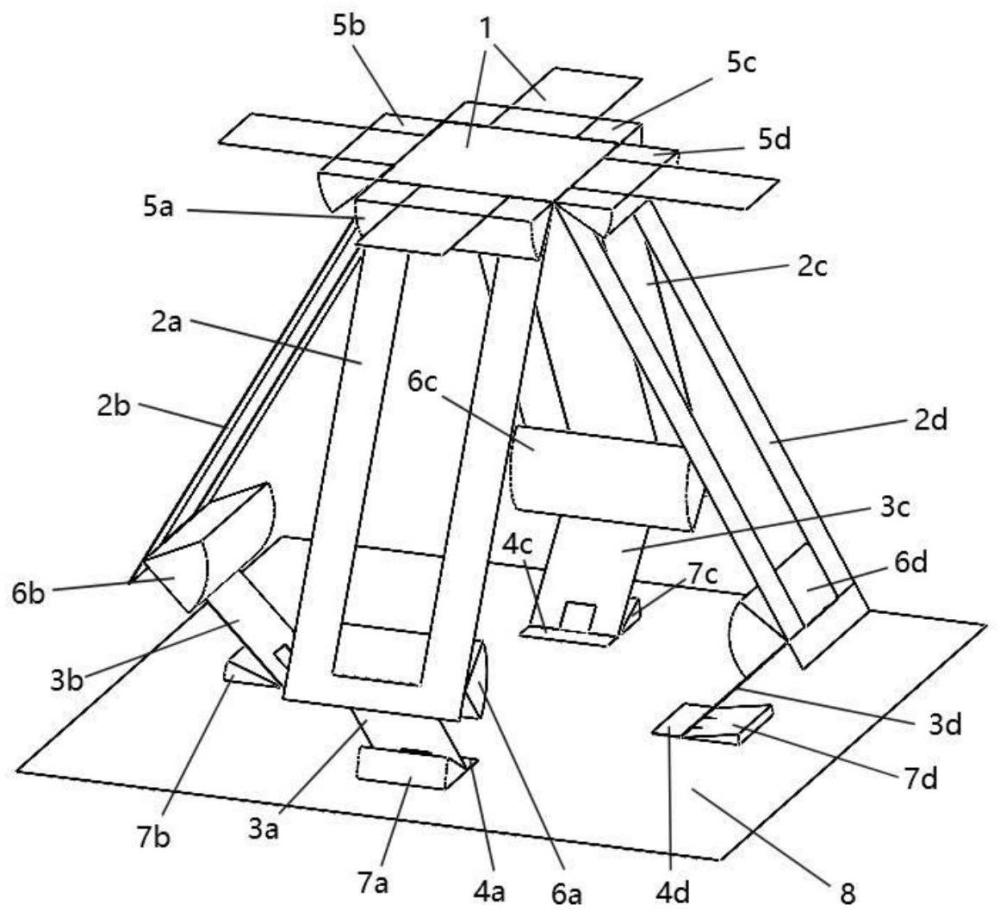
4、顶层结构,其包括铁磁质层以及铝制顶层,所述铁磁质层设置在所述铝制顶层的上表面;
5、第一铝制支撑结构,其包括第一铝制支撑结构甲,其上端设置在所述铝制顶层的下端,并且该第一铝制支撑结构甲与水平面形成的夹角定义为第一夹角甲;第一铝制支撑结构乙,其上端设置在所述铝制顶层的下端,并且该第一铝制支撑结构乙与水平面形成的夹角定义为第一夹角乙;第一铝制支撑结构丙,其上端设置在所述铝制顶层的下端,并且该第一铝制支撑结构丙与水平面形成的夹角定义为第一夹角丙;第一铝制支撑结构丁,其上端设置在所述铝制顶层的下端,并且该第一铝制支撑结构丁与水平面形成的夹角定义为第一夹角丁,其中第一铝制支撑结构甲、第一铝制支撑结构乙、第一铝制支撑结构丙、第一铝制支撑结构丁的长度相等,并且第一夹角甲、第一夹角乙、第一夹角丙、第一夹角丁相等;
6、第二铝制支撑结构,其包括第二铝制支撑结构甲,其上端设置在所述铝制顶层的下端,并且该第二铝制支撑结构甲与水平面形成的夹角定义为第二夹角甲;第二铝制支撑结构乙,其上端设置在所述铝制顶层的下端,并且该第二铝制支撑结构乙与水平面形成的夹角定义为第二夹角乙;第二铝制支撑结构丙,其上端设置在所述铝制顶层的下端,并且该第二铝制支撑结构丙与水平面形成的夹角定义为第二夹角丙;第二铝制支撑结构丁,其上端设置在所述铝制顶层的下端,并且该第二铝制支撑结构丁与水平面形成的夹角定义为第二夹角丁,其中第二铝制支撑结构甲、第二铝制支撑结构乙、第二铝制支撑结构丙、第二铝制支撑结构丁的长度相等,并且第二夹角甲、第二夹角乙、第二夹角丙、第二夹角丁相等;
7、第三铝制支撑结构,所述第三铝制支撑结构设置在水平面上,其包括第三铝制支撑结构甲,其上端设置在所述铝制顶层的下端;第三铝制支撑结构乙,其上端设置在所述铝制顶层的下端;第三铝制支撑结构丙,其上端设置在所述铝制顶层的下端;第三铝制支撑结构丁,其上端设置在所述铝制顶层的下端,其中第一铝制支撑结构甲、第一铝制支撑结构乙、第一铝制支撑结构丙、第一铝制支撑结构丁的长度相等;第三铝制支撑结构甲与水平面构成第三夹角甲;第三铝制支撑结构乙与水平面构成第三夹角乙;第三铝制支撑结构丙与水平面构成第三夹角丙;第三铝制支撑结构丁与水平面构成第三夹角丁,第三夹角甲、、第三夹角乙、第三夹角丙、第三夹角丁相等;
8、第一硅质支挡结构,其包括第一硅质支挡结构甲,其一端设置在铝制顶层与第一铝制支撑结构甲的重合端,并且该第一硅质支挡结构甲横截面圆心角为第一圆心角甲;第一硅质支挡结构乙,其一端设置在铝制顶层与第一铝制支撑结构乙的重合端,并且该第一硅质支挡结构乙横截面圆心角为第一圆心角乙;第一硅质支挡结构丙,其一端设置在铝制顶层与第一铝制支撑结构丙的重合端,并且该第一硅质支挡结构丙横截面圆心角为第一圆心角丙;第一硅质支挡结构丁,其一端设置在铝制顶层与第一铝制支撑结构丁的重合端,并且该第一硅质支挡结构丁横截面圆心角为第一圆心角丁,其中第一硅质支挡结构甲的长度等于所述第一铝制支撑结构甲的宽度,所述第一硅质支挡结构乙的长度等于所述第一铝制支撑结构乙的宽度,所述第一硅质支挡结构丙的长度等于所述第一铝制支撑结构丙的宽度,所述第一硅质支挡结构丁的长度等于所述第一铝制支撑结构丁的宽度,所述第一圆心角甲大于所述第一圆心角乙大于所述第一圆心角丙大于所述第一圆心角丁;圆心角大的,下方的第一铝制支撑结构先接触并停止压缩,其他还未接触的能继续压缩直至接触。大小顺序就是先后接触顺序。
9、第二硅质支挡结构,其包括第二硅质支挡结构甲,其一端设置在所述第一铝制支撑结构甲与所述第二铝制支撑结构甲的重合端,并且该第一硅质支挡结构甲横截面圆心角为第二圆心角甲;第二硅质支挡结构乙,其一端设置在所述第一铝制支撑结构甲与所述第二铝制支撑结构甲的重合端,并且该第一硅质支挡结构乙横截面圆心角为第二圆心角乙;第二硅质支挡结构丙,其一端设置在所述第一铝制支撑结构甲与所述第二铝制支撑结构甲的重合端,并且该第一硅质支挡结构丙横截面圆心角为第二圆心角丙;第二硅质支挡结构丁,其一端设置在所述第一铝制支撑结构甲与所述第二铝制支撑结构甲的重合端,并且该第一硅质支挡结构丁横截面圆心角为第二一圆心角丁;其中,所述第一硅质支挡结构甲的长度等于所述第一铝制支撑结构甲的宽度,所述第一硅质支挡结构乙的长度等于所述第一铝制支撑结构乙的宽度,所述第一硅质支挡结构丙的长度等于所述第一铝制支撑结构丙的宽度,所述第一硅质支挡结构丁的长度等于所述第一铝制支撑结构丁的宽度,所述第二圆心角甲大于所述第二圆心角乙大于所述第二圆心角丙大于所述第二圆心角丁;圆心角大的,下方的第一铝制支撑结构先接触并停止压缩,其他还未接触的能继续压缩直至接触。大小顺序就是先后接触顺序。
10、第三硅质支挡结构,设置在水平面上表面,其包括第三硅质支挡结构甲,其一端设置在所述第二铝制支撑结构甲与所述第三铝制支撑结构甲的重合端,并且该第一硅质支挡结构甲横截面圆心角为第三圆心角甲;第三硅质支挡结构乙,其一端设置在所述第二铝制支撑结构乙与所述第三铝制支撑结构乙的重合端,并且该第一硅质支挡结构乙横截面圆心角为第三圆心角乙;第三硅质支挡结构丙,其一端设置在所述第二铝制支撑结构丙与所述第三铝制支撑结构丙的重合端,并且该第一硅质支挡结构丙横截面圆心角为第三圆心角丙;第三硅质支挡结构丁,其一端设置在所述第一铝制支撑结构丁与所述第三铝制支撑结构丁的重合端,并且该第一硅质支挡结构丁横截面圆心角为第三圆心角丁,其中,所述第一硅质支挡结构甲的长度等于所述第二铝制支撑结构甲的宽度,所述第一硅质支挡结构乙的长度等于所述第二铝制支撑结构乙的宽度,所述第一硅质支挡结构丙的长度等于所述第二铝制支撑结构丙的宽度,所述第一硅质支挡结构丁的长度等于所述第二铝制支撑结构丁的宽度,所述第三圆心角丙大于所述第三圆心角丁大于所述第三圆心角甲大于所述第三圆心角乙,想要第二级压缩能让倾斜方向相反。
11、进一步的,第一硅质支挡结构、第二硅质支挡结构和第三硅质支挡结构都是扇形柱。
12、本发明还公开了一种四向磁驱动的柔性跳跃机器人的使用方法,包括采用第一强度的磁场对柔性跳跃机器人进行作用,以实现x轴正向运动,以及采用第二强度的磁场对柔性跳跃机器人进行作用,以实现x轴逆向运动,其中,所述第二强度的磁场强于所述第一强度的磁场,以所述第一铝制支撑结构丙至所述第一铝制支撑结构甲的方向为x轴正向方向,其相反方向为x轴逆向方向;
13、采用第三强度的磁场对柔性跳跃机器人进行作用,以实现y轴正向运动,以及采用第四强度的磁场对所述柔性跳跃机器人进行作用,以实现y轴逆向运动,其中,所述第四强度的磁场强于所述第三强度的磁场照,以所述第一铝制支撑结构乙至所述第一铝制支撑结构丁的方向为y轴正向方向,其相反方向为y轴逆向方向。
14、进一步的,采用第一强度的磁场对柔性跳跃机器人进行作用,以实现x轴正向运动,其具体包括:
15、步骤s1、采用所述第一强度的磁场,对柔性跳跃机器人进行作用,使得第一铝制支撑结构和第二铝制支撑结构弯曲变形;
16、步骤s2、持续作用直到所述第一铝制支撑结构丙接触到第一硅质支挡结构丙,所述第一铝制支撑结构丙接触到第二硅质支挡结构丙,所述第二铝制支撑结构甲接触到第三硅质支挡结构甲,而所述第一铝制支撑结构甲未接触到第一硅质支挡结构甲,所述第一铝制支撑结构甲未接触到第二硅质支挡结构甲,所述第二铝制支撑结构丙未接触到第三硅质支挡结构丙时,停止作用,此时,所述第一铝制支撑结构和第二铝制支撑结构进行恢复,压缩形变变小,该柔性跳跃机器人实现沿着x轴正向进行运动;
17、步骤s3、重复该步骤s1-步骤s2,对柔性跳跃机器人反复施加所述第一强度的磁场,使得其持续沿着x轴正向进行运动。
18、进一步的,采用第二强度的磁场对所述柔性跳跃机器人进行作用,以实现x轴逆向运动,其具体包括:
19、步骤s1、采用所述第二强度的磁场,对柔性跳跃机器人进行作用,使得第一铝制支撑结构和第二铝制支撑结构弯曲变形;
20、步骤s2、持续作用直到所述第一铝制支撑结构甲接触到第一硅质支挡结构甲,所述第一铝制支撑结构甲接触到第二硅质支挡结构甲,所述第二铝制支撑结构丙接触到第三硅质支挡结构丙,而所述第一铝制支撑结构丙未接触到第一硅质支挡结构丙,所述第一铝制支撑结构丙未接触到第二硅质支挡结构丙,所述第二铝制支撑结构甲未接触到第三硅质支挡结构甲时,停止作用,此时,所述第一铝制支撑结构和第二铝制支撑结构进行恢复,压缩形变变小,该柔性跳跃机器人实现沿着x轴逆向进行运动;
21、步骤s3、重复该步骤s1-步骤s2,对柔性跳跃机器人反复施加所述第二强度的磁场,使得其持续沿着x轴逆向进行运动。
22、进一步的,采用第三强度的磁场对所述柔性跳跃机器人进行作用,以实现y轴正向运动,其具体包括:
23、步骤s1、采用所述第三强度的磁场,对所述柔性跳跃机器人进行作用,使得第一铝制支撑结构和第二铝制支撑结构弯曲变形;
24、步骤s2、持续作用直到所述第一铝制支撑结构丁接触到第一硅质支挡结构丁,所述第一铝制支撑结构丁接触到第二硅质支挡结构丁,所述第二铝制支撑结构乙接触到第三硅质支挡结构乙,而所述第一铝制支撑结构乙未接触到第一硅质支挡结构乙,所述第一铝制支撑结构乙未接触到第二硅质支挡结构乙,所述第二铝制支撑结构丁未接触到第三硅质支挡结构丁时,停止作用,此时,所述第一铝制支撑结构和第二铝制支撑结构(3)进行恢复,压缩形变变小,该柔性跳跃机器人实现沿着y轴正向进行运动;
25、步骤s3、重复该步骤s1-步骤s2,对所述柔性跳跃机器人反复施加所述第三强度的磁场,使得其持续沿着y轴正向进行运动。
26、进一步的,采用第四强度的磁场对柔性跳跃机器人进行作用,以实现y轴逆向运动,其具体包括:
27、步骤s1、采用所述第四强度的磁场,对所述柔性跳跃机器人进行作用,使得第一铝制支撑结构和第二铝制支撑结构弯曲变形;
28、步骤s2、持续作用直到所述第一铝制支撑结构乙接触到第一硅质支挡结构乙,所述第一铝制支撑结构乙接触到第二硅质支挡结构乙,所述第二铝制支撑结构丁接触到第三硅质支挡结构丁,而所述第一铝制支撑结构丁未接触到第一硅质支挡结构丁,所述第一铝制支撑结构丁未接触到第二硅质支挡结构丁,所述第二铝制支撑结构乙未接触到第三硅质支挡结构乙时,停止作用,此时,所述第一铝制支撑结构和第二铝制支撑结构(3)进行恢复,压缩形变变小,该柔性跳跃机器人实现沿着y轴逆向进行运动;
29、步骤s3、重复该步骤s1-步骤s2,对所述柔性跳跃机器人反复施加所述第四强度的磁场,使得其持续沿着y轴逆向进行运动
30、本发明的一种四向磁驱动的柔性跳跃机器人及其使用方法,具有以下优点:
31、本发明提供的柔性跳跃机器人,其包括的第一铝制支撑结构和第二铝制支撑结构由于磁场力的施加而压缩弯曲,进而产生跳跃驱动力,具有结构简单、驱动方式简易的优势。该结构通过铝制顶层四端的第一铝制支撑结构和第二铝制支撑结构与水平面构成的夹角不同实现四向驱动,具有可四向跳跃的特点。
32、本发明的使用方法在不同强度的磁场下,相对两端的铝制支撑结构被硅胶阻挡结构限制在不同的压缩角度,从而获得两个方向交替倾斜,撤除磁场,铝制支撑结构进行恢复,此时x轴正负方向铝制支撑结构的弹力不同,从而实现向x轴正方向或负方向的运动;y轴正负方向铝制支撑结构的弹力不同,从而实现向y轴正方向或负方向的运动。x与y方向的压缩配合可实现四向运动。这使柔性跳跃机器人具有结构简单、驱动方式易执行、可四向跳跃等特点。
- 还没有人留言评论。精彩留言会获得点赞!