一种TEC自动封装系统的输送治具、封装系统的制作方法
一种tec自动封装系统的输送治具、封装系统
技术领域
1.本实用新型属于电子技术领域,更具体而言,涉及一种tec自动封装系统的输送治具、封装系统。
背景技术:
2.目前tec(半导体制冷器thermo electric cooler)封装通常采用的方法为手动组装,设备单机运作封装。现有技术的主要缺点:
3.1.效率低;
4.2.人均uph低;
5.3.品质差(如:偏移、倾斜、角度、外观等)
6.4.手动组装过程难管控全部手动作业。
7.如cn201810067676.0公开了一种半导体制冷片焊接装置,其包括焊接区以及冷却区,所述焊接区顶部安装有上加热块,冷却区顶部安装有上冷却块;所述焊接区底部正对上加热块安装有可升降的下加热块,冷却区底部正对上冷却块安装有可升降的下冷却块,所述焊接区以及冷却区之间安装有转换工作台,所述转换工作台包括旋转机构以及用于放置半导体制冷片的转盘,所述转盘为框体结构,框体的中空部分的面积不小于下加热块的面积,转盘上设置有用于固定半导体制冷片预成型夹具的定位孔。
8.可见其也仅仅公开了某一个工序的自动化加工设备。
9.经过大量检索可以发现:本领域中暂时没有一套成熟的自动化生产线以封装tec。
10.所以,本案所要解决的技术问题是:如何利用市场成熟设备结合适当的改造,以实现tec的全自动封装生产。
11.该技术问题存在两个难点:第一、如何解决自动封装过程中的tec的固定、输送;第二、如何实现自动封装操作。
技术实现要素:
12.本实用新型的主要目的在于提供一种tec自动封装系统的输送治具,该输送治具可实现对于tec的定位、固定和输送,以保证在各工序进行封装操作时各半成品是稳定可靠的。
13.同时,本实用新型还提供了一种tec自动封装系统,该系统能够实现tec的自动封装。
14.根据本实用新型的第一方面,提供了一种tec自动封装系统的输送治具,所述输送治具包括载体本体,所述载体本体上设有若干定位槽,所述定位槽与待封装的tec的下陶瓷板的形状匹配。
15.在上述的tec自动封装系统的输送治具中,所述定位槽的角的位置设有避让槽。
16.在上述的tec自动封装系统的输送治具中,所述定位槽分为两排设置在载体本体上;所述载体本体设有位于定位槽内的通孔。
17.同时,本发明还提供了一种tec自动封装系统,所述封装系统包括输送轨道,所述输送轨道上依次布置有多个如上任一所述的输送治具,还包括沿输送轨道依次布置的用于将下陶瓷板移送至定位槽内的第一贴片机、用于在下陶瓷板上用于安装半导体制冷粒子的位置布施焊剂的第一点锡机、用于将半导体制冷粒子移送到下陶瓷板上用于安装半导体制冷粒子的位置的移送装置、第一回流焊炉、用于在半导体制冷粒子的顶部布施焊剂的第二点锡机、用于将上陶瓷板移送并贴合在半导体制冷粒子顶部的第二贴片机、第二回流焊炉。
18.在上述的tec自动封装系统中,所述封装系统还包括设置在输送轨道尾部的下料装置。
19.在上述的tec自动封装系统中,所述移送装置包括用于放置多个半导体制冷粒子的原料平台、第一机械手、第二机械手以及位于第一机械手和第二机械手之间的转移平台;所述第一机械手用于将原料平台上的半导体制冷粒子转移到转移平台,所述第二机械手用于将转移平台上的半导体制冷粒子转移到下陶瓷板上用于安装半导体制冷粒子的位置。
20.在上述的tec自动封装系统中,所述第一机械手包括第一支架、固定在第一支架上的第一升降模块、固定在第一升降模块的动力输出端的摆动模块,所述摆动模块的动力输出端连接有摆动臂,所述摆动臂的末端连接有与外设气源连接的第一吸盘,所述摆动模块用于驱动摆动臂在水平面转动;所述摆动臂驱动吸盘在原料平台、转移平台之间移动。
21.在上述的tec自动封装系统中,所述第二机械手包括第二支架、固定在第二支架上的第二升降模块、固定在第二升降模块的动力输出端的平移模块,所述平移模块的动力输出端连接与外设气源连接的第二吸盘,所述平移模块用于驱动第二吸盘在转移平台、下陶瓷板之间往复移动;所述输送轨道的驱动模块、平移模块、第二升降模块联动。
22.本实用新型上述技术方案中的一个技术方案至少具有如下优点或有益效果之一:
23.本实用新型的tec自动封装系统的输送治具提出了一种适用于本方案全自动封装系统的输送结构,其能够实现同时输送多个半成品至下一工序,其输送过程稳定,载体中的半成品不会发生偏移。
24.此外,本实用新型的tec自动封装系统在此基础上增设第一贴片机、第一点锡机、移送装置、第一回流焊炉、第二点锡机、第二回流焊炉,其流程连续性、自动化程度高。
25.本方案的第一贴片机、第二贴片机、第一点锡机、第二点锡机、第一回流焊炉、第二回流焊炉均采购于市场成熟的设备,其成本低、自动化程度高。
附图说明
26.下面结合附图和实施例对本实用新型进一步地说明;
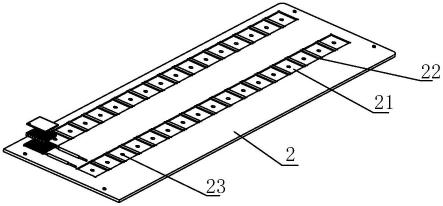
27.图1是本实用新型的实施例1的结构示意图;
28.图2是本实用新型的实施例1和2的tec的结构爆炸图;
29.图3是本实用新型的实施例2的流程示意图;
30.图4是本实用新型的实施例2的输送轨道和输送治具配合示意图;
31.图5是本实用新型的实施例2的移送装置的俯视图;
32.图6是本实用新型的实施例2的第一机械手的主视图;
33.图7是本实用新型的实施例2的第二机械手的主视图。
具体实施方式
34.下面详细描述本实用新型的实施方式,实施方式的示例在附图中示出,其中相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
35.实施例1
36.参照图1-2所示,一种tec自动封装系统的输送治具,包括载体本体2,所述载体本体2上设有若干定位槽21,所述定位槽21与待封装的tec的陶瓷板的形状匹配。
37.定位槽21一般为矩形,以适配下陶瓷板的形状。
38.优选地,所述定位槽21的四个角的位置设有圆形的避让槽22。
39.优选地,所述定位槽21分为两排设置在载体本体2上,每排17个避让槽22,更为优选地,为了让下陶瓷板更好的固定在定位槽21内,所述定位槽21内还开设有通孔23,所述通孔23主要是为了在放置下陶瓷板时槽内的气体可以排走,以使下陶瓷板能够顺利的放进去。
40.实施例2
41.参考图2-7,一种tec自动封装系统,包括输送轨道1,所述输送轨道1上依次布置有多个如实施例1所述的输送治具,还包括沿输送轨道1依次布置的用于将下陶瓷板100移送至定位槽21内的第一贴片机3、用于在下陶瓷板上用于安装半导体制冷粒子200的位置布施焊剂的第一点锡机4、用于将半导体制冷粒子移送到下陶瓷板上用于安装半导体制冷粒子的位置的移送装置5、第一回流焊炉6、用于在半导体制冷粒子的顶部布施焊剂的第二点锡机7、用于将上陶瓷板300移送并贴合在半导体制冷粒子顶部的第二贴片机8、第二回流焊炉9,更为优选地,还包括设置在输送轨道1尾部的下料装置10,下料装置10通过带吸盘的机械手即可实现对于安装好的tec的吸附移送工作,通过吸盘吸附tec的上陶瓷板即可。
42.需要说明的是,tec的结构一般包括下陶瓷板100、上陶瓷板300,以及下陶瓷板100、上陶瓷板300之间的半导体制冷粒子200,相邻的半导体制冷粒子的np极倒置且电连接,同一个tec内的半导体制冷粒子依次电连接构成一个连续的串联电路;tec的一端为冷端、一端为热端。为了提高半导体制冷粒子和下陶瓷板100、上陶瓷板300连接稳定性,其通过锡实现固定和导电连接,并且在下陶瓷板100、上陶瓷板300的对应的面上设置用于提高焊接强度的金属化层400。tec的面积为12*12mm,当然本实施例并不排斥其他规格的tec。
43.tec的封装过程为:通过手工或自动设备将载体本体2放到输送轨道1上的设定位置,由于本系统有高温加热的回流焊炉,所以本实施例的输送轨道选择能够耐高温的金属轨道,其轨道的宽度和载体本体2的宽度一致,这样载体本体2就可以准确的卡入输送轨道内,本实施例的输送轨道可选择为cn201821845284.4所示的芯片封装用排片机的输送单元中的输送导轨和输送模块,以及其他用于封装的输送导轨都是可行的。
44.通过第一贴片机3将下陶瓷板吸附转移到定位槽21内,直至34个定位槽21全部放置了下陶瓷板;
45.通过第一点锡机4在下陶瓷板上预设的位置进行点锡,如附图2所示,下陶瓷板上有32对金属化层,锡应该点在这些金属化层上;
46.通过移送装置5逐一将半导体制冷粒子放置到各金属化层上,需要注意的是,相邻
的两个半导体制冷粒子n极、p极是相反的;
47.第一回流焊炉6实现锡焊接,使半导体制冷粒子、下陶瓷板能够粘结紧密;
48.第二点锡机7要对各半导体制冷粒子的顶部点锡;
49.第二贴片机8将上陶瓷板贴合在半导体制冷粒子的上表面;
50.第二回流焊炉9实现上陶瓷板和半导体制冷粒子通过锡固定连接。
51.一般来说,输送轨道可以对载体本体2进行准确的固定输送,即使如此,在所有工序上建议配置图像识别系统。
52.比如在第一个工序上,第一贴片机3以及倒数第二个工序的第二贴片机8应该选择具有自动精准对位、带摄像头的贴片机;本实施例的第一点锡机4、第二点锡机7可采用本领域任何可用的具有摄像定位功能或者后期加装摄像头的点锡机,可参考深圳市巨力机电自动化有限公司提供的jl-h331r单头单平台焊锡机带旋转轴。
53.第一回流焊炉6、第二回流焊炉9可选用本领域任何的回流焊炉,在本实施例中不作过多限制。
54.作为本实施例的优选,所述移送装置5可以参考图5-7所示方案,所述移送装置5包括用于放置多个半导体制冷粒子的原料平台51、第一机械手52、第二机械手53以及位于第一机械手52和第二机械手53之间的转移平台54;所述第一机械手52用于将原料平台51上的半导体制冷粒子转移到转移平台54,所述第二机械手53用于将转移平台54上的半导体制冷粒子转移到下陶瓷板上用于安装半导体制冷粒子的位置。
55.进一步优选地,还设有与第二机械手53配套的成像摄像头55,成像摄像头55用于精确的分辨各金属化层的位置,供第二机械手53移动到合适的位置用以安放半导体制冷粒子。
56.本实施例在第一机械手52和第二机械手53之间设置转移平台54,第一机械手52会将半导体制冷粒子放到转移平台54上的唯一的位置,这样第二机械手53就非常容易拿取。
57.更为优选地,所述第一机械手52包括第一支架521、固定在第一支架521上的第一升降模块522、固定在第一升降模块522的动力输出端的摆动模块523,所述摆动模块523的动力输出端连接有摆动臂524,所述摆动臂524的末端连接有与外设气源连接的第一吸盘525,所述摆动模块523用于驱动摆动臂524在水平面转动;所述摆动臂524驱动吸盘在原料平台51、转移平台54之间移动;所述第二机械手53包括第二支架531、固定在第二支架531上的第二升降模块532、固定在第二升降模块532的动力输出端的平移模块,所述平移模块的动力输出端连接与外设气源连接的第二吸盘534,所述平移模块用于驱动第二吸盘534在转移平台54、下陶瓷板之间往复移动;所述输送轨道1的驱动模块、平移模块、第二升降模块532联动;所述成像摄像头固定在第二支架531的端部;成像摄像头拍摄到的图像会发送给控制器,控制器处理后会告知驱动模块、平移模块、第二升降模块532联动下一个要放半导体制冷粒子的位置,这样在有需要的情况下驱动模块驱动输送轨道1轻微前移,平移模块会移动到指定的位置,第二升降模块532会在平移模块移动到位的情况下下降,将半导体制冷粒子放下。隐含的,外设的气源也是通过控制器来控制的,实现与第一机械手52、第二机械手53的联动。
58.第一升降模块522、第二升降模块532一般都是动力输出端上下升降的气缸,如果为了提高精确度也可以采用电缸。
59.摆动模块523一般为摆动电机,其动力输出端连接摆动臂524;
60.第一吸盘525和第二吸盘534所连接的外设气源通过独立管道连接,管道上具有气阀和放空阀,这两个阀门统一通过控制器控制。
61.平移模块一般包括电机537、通过电机驱动的水平布置的丝杆535以及一个或两个导向杆536,丝杆535、导向杆536上套设移动块533,移动块533上设置第二吸盘534,通过电机驱动丝杆535,丝杆535驱动移动块533水平移动,实现第二吸盘534的平移。
62.需要额外说的是,本实施例中,摆动臂524一般是固定长度,也就是说原料平台51每次输出一个半导体制冷粒子的位置应该是唯一固定的,即摆动臂524每次摆动到极限位置时,应当第一吸盘525正好在半导体制冷粒子的上方。
63.在本实施例中,原料平台51上设有一个或多个原料输送槽511,原料输送槽511内的两侧设有输送皮带512,通过输送皮带512夹持原料输送槽511内的半导体制冷粒子往前移动,原料输送槽511的端部即为摆动臂524摆动的极限位置之一,半导体制冷粒子在原料输送槽511中应当预先的依次的np极交替放置,即前一个半导体制冷粒子为p极向上,那么下一个半导体制冷粒子的n极向上。
64.尽管已经示出和描述了本实用新型的实施方式,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施方式进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1