咖啡拉花智能示教装置及方法与流程
本发明涉及咖啡拉花,特别是涉及一种咖啡拉花智能示教装置及方法。
背景技术:
1、目前,使用机器人进行咖啡拉花前都需要人工进行示教,人工通过示教器控制机器人到达目标位置并将目标位置储存在控制柜内,待示教完成后机器人再进行复现。然而,对于复杂的花型,单台机器人需要示教的点位达到上千点,且为了保证拉花效果,这些点位都需要根据拉花效果不断进行调整,需要专业的机器人应用工程师进行操作,示教过程中需占用机器人过长时间,导致人力物力浪费,同时也无法保证拉花效果的精确性,当更换另一种编程语言的机器人时,所有的点位需要重新示教,因此需要一种智能咖啡拉花示教装置。
技术实现思路
1、本发明提供一种咖啡拉花智能示教装置及方法,以解决现有的使用机器人进行咖啡拉花前人工进行示教过程较为困难,无法高效,高精度复现的问题。
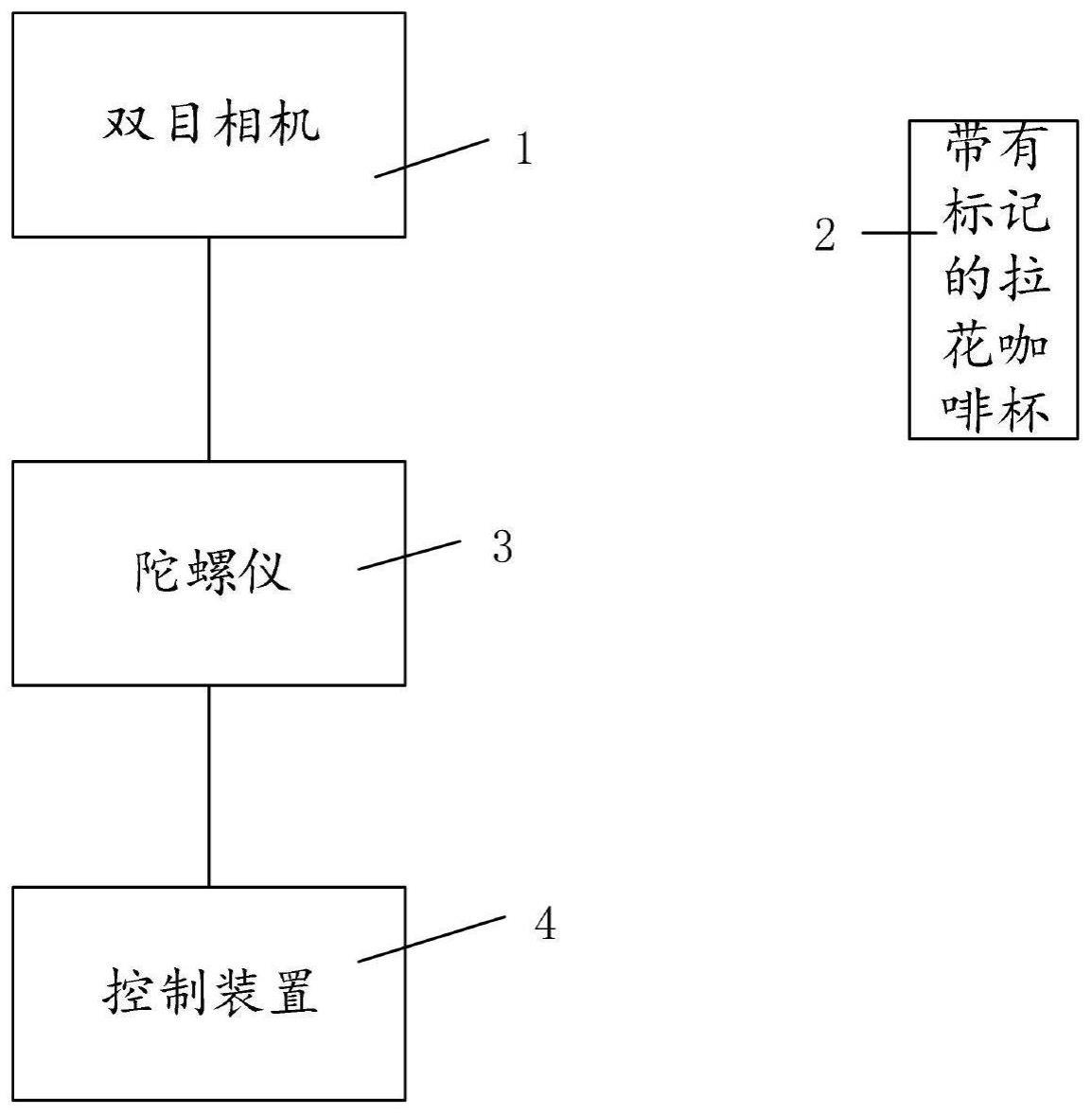
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种咖啡拉花智能示教装置,用于机器人咖啡拉花示教,其包括:双目相机、带有标记的拉花咖啡杯、陀螺仪和控制装置;所述双目相机和陀螺仪分别与所述控制装置信号连接;所述带有标记的拉花咖啡杯布置在所述双目相机拍照视野内,所述双目相机用于实时获取带有标记的拉花咖啡杯的动作图像参数;所述陀螺仪安装于所述双目相机上,所述控制装置通过陀螺仪记录的角度参数将所述双目相机获取的动作图像参数进行世界坐标系转换,得到带有标记的拉花咖啡杯的运动参数;所述控制装置将带有标记的拉花咖啡杯的运动参数转换成机器人咖啡拉花的运动程序。
3、作为本发明的进一步改进,所述带有标记的拉花咖啡杯采用led红外灯进行位姿点标记,至少三个led红外灯设置在拉花咖啡杯上。
4、作为本发明的进一步改进,所述双目相机在拍照视野内构成两个相机之间的视差,以使得所述双目相机内所述带有标记的拉花咖啡杯呈现三维图像,所述控制装置还包括视觉处理模块,所述视觉处理模块用于对所述带有标记的拉花咖啡杯的三维图像进行处理,经三维测量获得所述带有标记的拉花咖啡杯的空间姿态信息。
5、作为本发明的进一步改进,所述控制装置还包括空间姿态处理模块,用于通过陀螺仪记录的角度参数对所述带有标记的拉花咖啡杯的空间姿态信息进行识别处理。
6、作为本发明的进一步改进,所述控制装置还包括世界坐标系标定转换模块,所述世界坐标系标定转换模块通过所述陀螺仪世界坐标系将所述双目相机坐标系进行标定转换,使得所述双目相机坐标系与机器人坐标系处在同一世界坐标系。
7、作为本发明的进一步改进,所述控制装置还包括拉花运动路径生成模块,所述拉花运动路径生成模块将带有标记的拉花咖啡杯的运动参数转成拉花运动路径,并将拉花运动路径转换成机器人咖啡拉花的运动程序。
8、具体地,所述运动参数为带有标记的拉花杯的空间姿态、速度和加速度。
9、作为本发明的进一步改进,所述机器人咖啡拉花的运动程序用于机器人拉花,所述机器人为携带咖啡拉花点的6轴机器人,所述机器人咖啡拉花点与所述机器人拉花手的坐标相对应。
10、为解决上述技术问题,本发明采用的另一个技术方案是:提供一种咖啡拉花智能示教方法,用于机器人咖啡拉花示教,包括:
11、将拉花咖啡杯进行标记后布置在双目相机视野范围内;
12、通过双目相机实时获取带有标记的拉花咖啡杯的动作图像参数;
13、将陀螺仪安装在双目相机上,通过陀螺仪记录的角度参数将所述双目相机获取的动作图像参数进行世界坐标系标定转换,得到带有标记的拉花咖啡杯的运动参数;
14、将所述带有标记的拉花咖啡杯的运动参数转换成机器人进行咖啡拉花的运动程序。
15、本发明的有益效果是:本发明的机器人咖啡拉花智能示教方法及装置,其中装置包括:双目相机、带有标记的拉花咖啡杯、陀螺仪和控制装置;所述双目相机和陀螺仪分别与所述控制装置信号连接;所述带有标记的拉花咖啡杯布置在所述双目相机拍照视野内,所述双目相机用于实时获取带有标记的拉花咖啡杯的动作图像参数;所述陀螺仪安装于所述双目相机上,所述控制装置通过陀螺仪记录的角度参数将所述双目相机获取的动作图像参数进行世界坐标系转换,得到带有标记的拉花咖啡杯的运动参数;所述控制装置将带有标记的拉花咖啡杯的运动参数转换成机器人咖啡拉花的运动程序。通过上述咖啡拉花智能示教装置对咖啡拉花动作进行示教后生成拉花机器人的机器人咖啡拉花的运动程序,大大提升了机器人咖啡拉花的效率、美观度、精确快捷复现人工咖啡拉花过程。
技术特征:
1.一种咖啡拉花智能示教装置,用于机器人咖啡拉花示教,其特征在于,其包括:双目相机、带有标记的拉花咖啡杯、陀螺仪和控制装置;所述双目相机和陀螺仪分别与所述控制装置信号连接;所述带有标记的拉花咖啡杯布置在所述双目相机拍照视野内,所述双目相机用于实时获取带有标记的拉花咖啡杯的动作图像参数;所述陀螺仪安装于所述双目相机上,所述控制装置通过陀螺仪记录的角度参数将所述双目相机获取的动作图像参数进行世界坐标系转换,得到带有标记的拉花咖啡杯的运动参数;所述控制装置将带有标记的拉花咖啡杯的运动参数转换成机器人咖啡拉花的运动程序。
2.根据权利要求1所述的咖啡拉花智能示教装置,其特征在于,所述带有标记的拉花咖啡杯采用led红外灯进行位姿点标记,至少三个led红外灯设置在拉花咖啡杯上。
3.根据权利要求1所述的咖啡拉花智能示教装置,其特征在于,所述双目相机在拍照视野内构成两个相机之间的视差,以使得所述双目相机内所述带有标记的拉花咖啡杯呈现三维图像,所述控制装置还包括视觉处理模块,所述视觉处理模块用于对所述带有标记的拉花咖啡杯的三维图像进行处理,经三维测量获得所述带有标记的拉花咖啡杯的空间姿态信息。
4.根据权利要求3所述的咖啡拉花智能示教装置,其特征在于,所述控制装置还包括空间姿态处理模块,用于通过陀螺仪记录的角度参数对所述带有标记的拉花咖啡杯的空间姿态信息进行识别处理。
5.根据权利要求4所述的机器人咖啡拉花智能示教装置,其特征在于,所述控制装置还包括世界坐标系标定转换模块,所述世界坐标系标定转换模块通过所述陀螺仪世界坐标系将所述双目相机坐标系进行标定转换,使得所述双目相机坐标系与机器人坐标系处在同一世界坐标系。
6.根据权利要求1所述的机器人咖啡拉花智能示教装置,其特征在于,所述控制装置还包括拉花运动路径生成模块,所述拉花运动路径生成模块将带有标记的拉花咖啡杯的运动参数转成拉花运动路径,并将拉花运动路径转换成机器人咖啡拉花的运动程序。
7.根据权利要求1所述的机器人咖啡拉花智能示教装置,其特征在于,所述运动参数为带有标记的拉花杯的空间姿态、速度和加速度。
8.根据权利要求1所述的机器人咖啡拉花智能示教装置,其特征在于,所述机器人咖啡拉花的运动程序用于机器人拉花,所述机器人为携带咖啡拉花点的6轴机器人,所述机器人咖啡拉花点与所述机器人拉花手的坐标相对应。
9.一种咖啡拉花智能示教方法,用于机器人咖啡拉花示教,其特征在于,包括:
10.根据权利要求9所述的机器人咖啡拉花智能示教方法,其特征在于,所述将陀螺仪安装在双目相机上,通过陀螺仪记录的角度参数将所述双目相机获取的动作图像参数进行世界坐标系转换,得到带有标记的拉花咖啡杯的运动参数步骤之前还包括:
技术总结
本发明公开了一种咖啡拉花智能示教装置及方法,其中装置包括:双目相机、带有标记的拉花咖啡杯、陀螺仪和控制装置;所述双目相机和陀螺仪分别与所述控制装置信号连接;所述双目相机用于实时获取带有标记的拉花咖啡杯的动作图像参数,所述控制装置通过陀螺仪记录的角度参数将所述双目相机获取的动作图像参数进行世界坐标系转换,得到带有标记的拉花咖啡杯的运动参数;所述控制装置将带有标记的拉花咖啡杯的运动参数转换成机器人咖啡拉花的运动程序。通过上述咖啡拉花智能示教装置对咖啡拉花动作进行示教后生成拉花机器人的机器人咖啡拉花的运动程序,大大提升了机器人咖啡拉花的效率、美观度、精确快捷复现人工咖啡拉花过程。
技术研发人员:李励耘,黄绍平,谢启俊
受保护的技术使用者:广东天机智能系统有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!