一种基于综合评价及最优控制原理的机器人社交行为控制方法与流程
本发明涉及机器人控制,具体涉及一种基于综合评价及最优控制原理的机器人社交行为控制方法。
背景技术:
1、近年来,服务机器人已经成长为一个充满活力的领域,并不断得到重视。对于在人机环境中工作的机器人来说,与人进行社交互动的能力是必不可少的。为了实现有效的人机交互(hri),提出了由社会注意驱动的多目标感知,旨在使机器人在决策和对象选择过程中明确考虑人类的意图。一个成功的多对象交互取决于两个方面:社会注意模型,它指定了一个人如何感知社会线索并从几个社会对象中选择目标,以及运动学模型来表示相关行为。尽管人们在日常生活中非常善于运用社会行为,但在机器人身上表现社会行为的难度往往被低估了。由于社会环境和协议的复杂属性,它们的一些属性可能难以甚至不可能以分析方式形式化。另一方面,为了提高hri的协作成功率,理解个体对刺激作出反应并产生运动作为反应的潜在机制将是有益的。人工系统要同化于自然社会状态,就必须混合多模态,表达类人行为。
技术实现思路
1、为了克服现有技术的不足,本发明提供了一种基于综合评价及最优控制原理的机器人社交行为控制方法,通过对外部多模态信息采集,社交对象的综合决策,机器人眼—头执行器进行建模,求解神经传导噪声最小的运动轨迹,利用mpc控制器进行最优控制,实现机器人与多社交对象之间的并行交互。
2、本发明的目的是解决机器人在多目标社交场景下的选择机制和注意控制问题。针对由多个社会对象和多模态社会线索组成的社会条件,利用一种定量的社会意向评价方法,可以使机器人根据量化社交意图强度生成社会对象的优先级。在行为层面上,在电机伺服模型中表示眼-头协调注视,并通过最优控制建立运动学最小神经噪声约束方法,对机器人实施最优控制,产生仿人运动和注视效果,建立了多目标情境下社会对象选择与基于生理机制的凝视行为控制之间的联系。
3、为实现上述目的,本发明涉及的一种基于综合评价及最优控制原理的机器人社交行为控制方法,包括以下步骤:
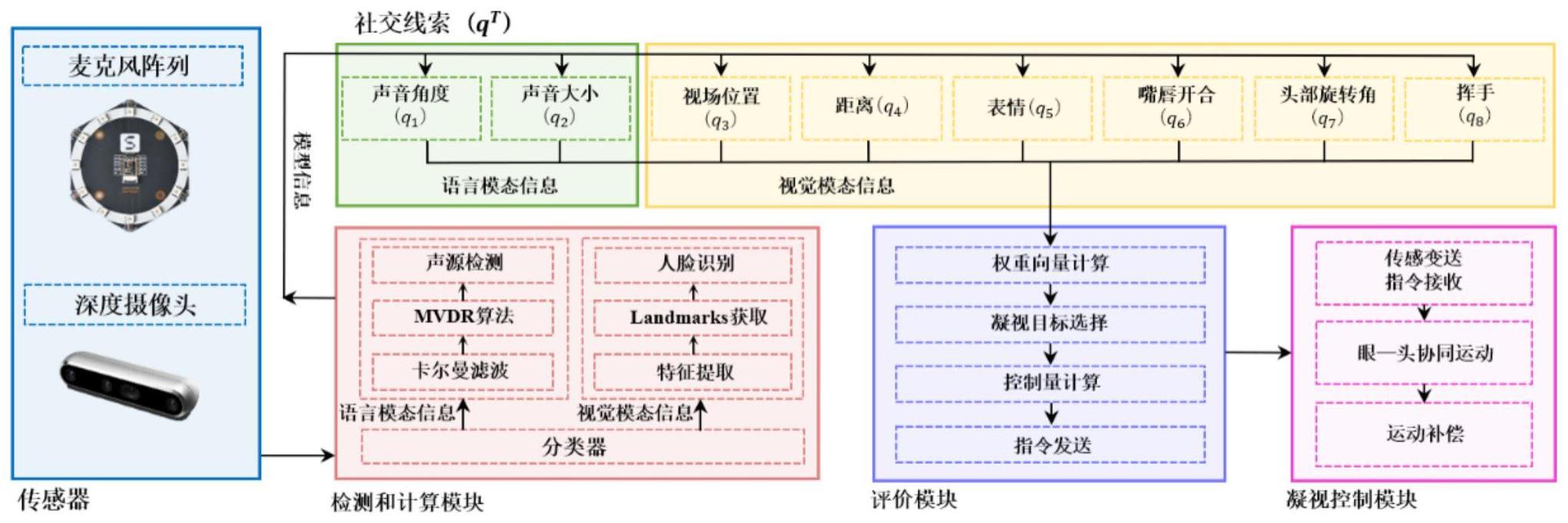
4、(1)采集多个社交对象表现出来的视觉以及声学多模态信息,这包括声音角度、声音大小、视场位置、距离、表情、嘴部开合、头部偏转角、挥手动作等;
5、(2)进而通过熵权计算获得多模态信息权重,通过综合评价获取每个社交对象的社交意图ea,机器人将选择ea值最高,即社交意图最高,的社会对象作为交流对象进行凝视;
6、(3)确定神经传导噪声最小情况下的机器人凝视ea值最高的社会对象进行时头部和眼部的运动轨迹;
7、(4)最后通过基于高斯过程在线干扰观测器的模型预测控制系统,按照神经传导噪声最小情况下的机器人头部和眼部的运动轨迹,对机器人的行为进行最优控制。
8、步骤(2)具体为:
9、(201)对于给定的包含n个社会对象的社交场景,采集每个社会对象对应的m种社交线索,构建决策矩阵q,将社交线索信息组织为
10、
11、其中,每一列表示同一种社会线索(模态信息),每一行表示同一个社会对象对应的社会线索,下标j表示不同种类的社会线索,i表示不同的社会对象,qij表示的第i个社会对象的第j种社会线索,
12、对于决策矩阵q中的社会线索qij,如果其具有成本属性,按照公式(2)则将其转化为利益属性如果其具有利益属性则不进行处理,然后通过线性归一化得到归一化决策矩阵e,
13、
14、其中,为该类社交线索能取得的极大值,ac为相对于的一个小量,
15、
16、
17、采用熵权法对社会线索进行权重分配,计算第j个社会线索的第i个样本值的比例为
18、
19、定义第j个社会线索的熵和系数分别为
20、
21、dj=1-ηj,j∈{1,2,...,m} (7)
22、得到第j个社会线索的权重wj,进而得到包括m种社交线索权重的权矩阵w=diag(w1,w2,...,wm)
23、
24、用权矩阵w=diag(w1,w2,...,wm)左乘每个归一化向量ei=(e1,e2,...,em),得到权决策矩阵e′={e′ij},通过以上计算,每个社会线索根据其离散度被分配权重,然后,利用topsis算法根据e′ij与理想点集的距离对社交对象进行排序,和分别是n个社会对象中同一种社交线索的最大值和最小值的集合,定义如下
25、
26、
27、其中,j+为效益属性索引集,表示第j个社会线索的最大值,表示第j个社会线索的最小值,j∈{1,2,...,m},每个归一化状态向量到和的距离定义为和
28、
29、
30、每个社会对象与负理想点的接近程度为
31、
32、(202)e′用于计算第i个社会对象ei与理想点之间的gc系数与正理想点的系数为
33、
34、式中ρ∈[0,1]表示分辨率因子,然后,每个目标与正理想点e+之间的gc系数矩阵可以建立如下
35、
36、然后,得到第i个社会对象的正理想方案的灰度关联度
37、
38、类似地,得到:z-和
39、
40、
41、
42、第i个社会对象的gc接近度zi利用式(17)计算,
43、
44、在实际交互中,潜在的社交对象不一定同时具有高和高zi(203)根据最小二乘优化原则将和zi两个评价指标进行融合如下
45、
46、机器人将选择ea值最高,即社交意图最高,的社会对象作为交流对象进行凝视。
47、具体地,步骤(4)最后通过基于高斯过程在线干扰观测器的模型预测控制系统,按照神经传导噪声最小情况下的机器人头部和眼部的运动轨迹,对机器人的行为进行最优控制,具体为:
48、机器人眼球运动的和头部转动的状态空间方程为
49、
50、公式(21)利用泰勒级数展开,得到离散时间线性系统误差状态方程为
51、
52、式中,表示离散系统的状态矩阵,表示离散系统的输入矩阵,s(k)表示k时刻的误差,u(k)表示k时刻的输入,下标d表示每个变量的参考值,即sd(k)表示s(k)的参考值,ud(k)表示u(k)的参考值。
53、考虑约束条件时,mpc优化问题定义如下
54、
55、其中,代表以第k时刻为基准,第i时刻的状态变量,q和r是加权矩阵,np和nc分别表示预测水平和控制水平,代表第k+i时刻的状态变量,代表第k+1时刻的输入,和分别代表xe和xh在对应离散时刻的值,γmax表示机器人头部和眼部之间的距离限制,和表示执行机构的可达范围,和表示控制信号的强度约束,利用二次规划方法求解方程(30),得到最优控制序列uk*={u(k+1|k),i=0,1,…,nc-1}和最优状态序列sk*={s(k+1|k),i=1,2,…,np},通过按照最优控制序列uk*和最优状态序列sk*控制机器人运行,实现机器人仿人注视行为的效果。
56、本发明与现有技术相比具有以下有益效果:本发明以多目标社交场景下的机器人控制为研究对象,提出了定量社交意图评价方法和注视行为控制策略。通过提出的问题,机器人可以融合来自多个对象的多模态社会线索,获得它们的社会关注值,最终生成社会优先级。针对选定的目标人群,建立了眼-头协调注视行为的运动学模型,提出了基于最优神经噪声准则的控制策略。另外,本发明提出的控制准则可以迁移到机器人身体的参与机制,构建完整的“眼-头-体”协调模型的控制策略。
- 还没有人留言评论。精彩留言会获得点赞!