AGV智能立体停车充电库的制作方法
本发明涉及一种agv智能立体停车充电库。
背景技术:
1、现在有很多智能化工厂会使用大量agv(搬运机器人)进行货物搬运输送。agv需要充电运行,如今的agv充电桩一般是设置在固定的充电位置,是安装于充电侧板上的侧充或者安装地面的地充,这样的侧充或地充只能利用平面空间同时对多个agv进行充电,占用的充电空间较大,降低了工厂的空间利用率。
技术实现思路
1、本发明提供了一种agv智能立体停车充电库解决上述提到的技术问题,具体采用如下的技术方案:
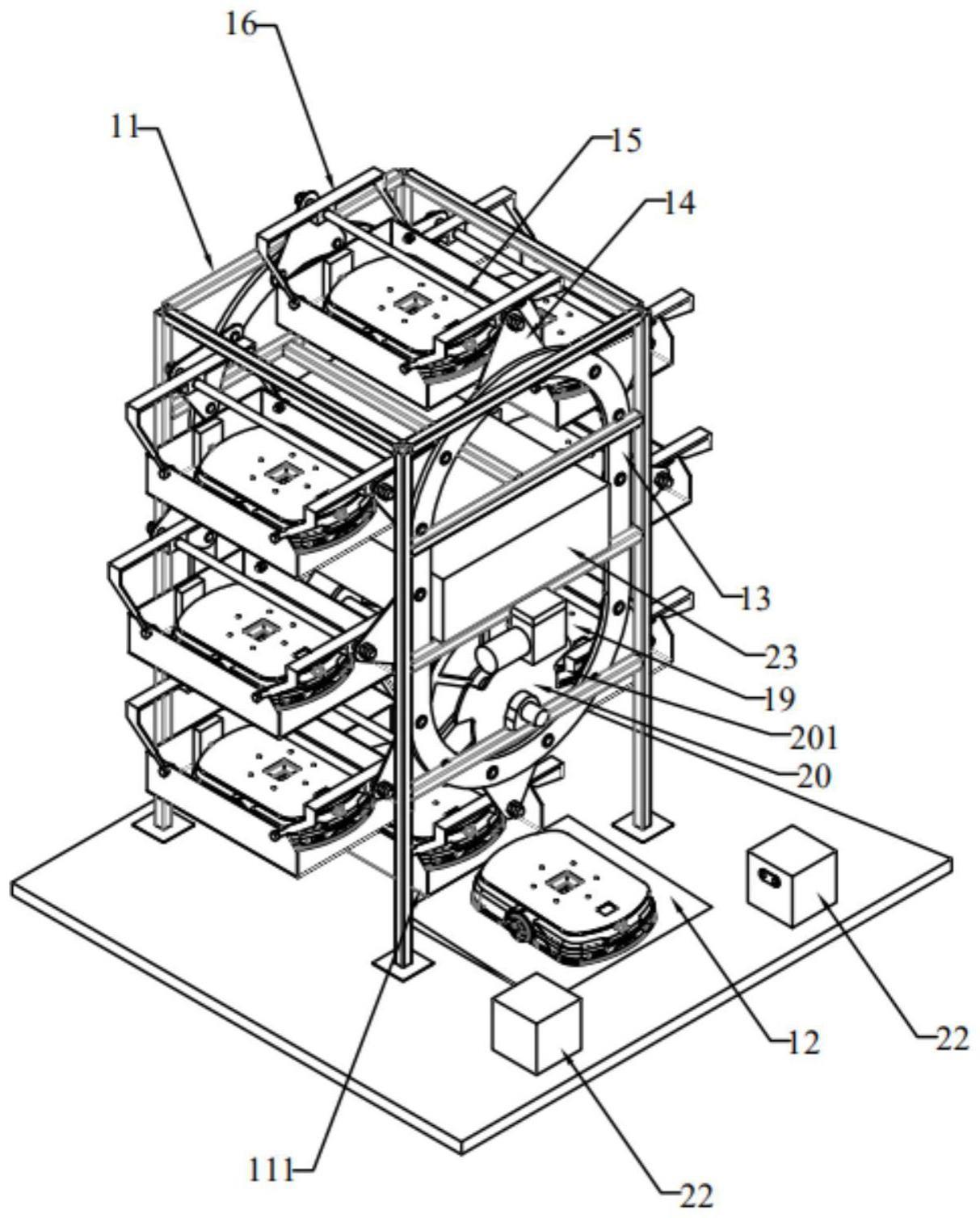
2、一种agv智能立体停车充电库,包括:支撑架;支撑架在相对的两个内侧对应设有导轨;导轨内设有转动件;转动件沿导轨转动设置;转动件在其周向上等间距固定有多个支撑块;两个转动件上的多个支撑块一一对应设置且相对应的两个支撑块之间连接有支撑轴;支撑轴上转动设置有用于为agv进行充电的托盘组件;支撑架上还设有:驱动组件和分度盘;驱动组件的输出端连接至分度盘以带动分度盘进行转动;分度盘形成有多个驱动槽;分度盘在转动时,多个驱动槽中始终有一个与多个支撑轴中的一个保持啮合以驱动支撑轴绕导轨的中轴线转动;托盘组件包括:支撑托盘;支撑托盘通过分布在支撑托盘的两端的转动架转动连接至支撑轴;支撑托盘的前端形成有用于供agv驶入的开口且后端设有为agv进行充电的充电组件;托盘组件的底侧还设有用于供agv识别其使用的充电组件的编号的二维码;支撑架的与开口相对的一侧形成有用于供agv从开口驶入支撑托盘的入口;入口的两侧设有用于检测驶入入口的agv的型号和编号的检测器;支撑架内还设有用于接受信号并对信号进行处理以控制驱动组件和充电组件进行运行的控制器;驱动组件、充电组件和检测器均通讯连接至控制器;agv智能立体停车充电库还包括用于引导agv驶入支撑托盘的导航装置。
3、进一步地,驱动组件包括:安装于支撑架的驱动电机和减速机;驱动电机的输出端连接至减速机;支撑架上转动设置有相互平行的驱动轴和从动轴;驱动轴的两端分别设有驱动齿轮;从动轴的两端分别在与两个驱动齿轮对应的位置设有从动齿轮;相对应设置的驱动齿轮与从动齿轮啮合;分度盘固定至从动轴;减速机的输出端与驱动齿轮啮合。
4、进一步地,驱动齿轮的直径与从动齿轮的直径比为2:15。
5、进一步地,充电组件包括:充电器和充电头;充电器电性连接至电源;充电头柔性连接至充电器。
6、进一步地,支撑托盘的两端的转动架的上端通过中部形成的轴孔转动套设于支撑轴的外周;支撑托盘的两端的转动架的下端通过螺钉固定至支撑托盘的两侧。
7、进一步地,两个转动架分别向远离支撑托盘的中部的方向倾斜设置;转动架偏离竖直线的角度范围为小于26度。
8、进一步地,支撑块为三角形支撑块;支撑轴的两端分别固定至两个对应的三角形的支撑块的相对应的角上。
9、进一步地,支撑架的外周套设有壳体;壳体上设有用于供工作人员输入操作的操作屏和用于显示充电信息的显示屏;操作屏和显示屏均电性连接至控制器。
10、进一步地,入口处设有用于供agv停放以等待控制的托盘组件转动至入口处的斜坡。
11、进一步地,导航装置为激光导航组件;激光导航组件包括:设置在行驶道路上的激光发射器和设置在agv车体上的激光检测器;agv通过激光检测器检测到的激光信号控制agv的驱动轮行驶方向。
12、本发明的有益之处在于所提供的agv智能立体停车充电库能够节约充电空间,对三维空间进行充分的利用,提高工厂场地的利用率,同时提高对agv的充电效率。
技术特征:
1.一种agv智能立体停车充电库,其特征在于,包括:支撑架;
2.根据权利要求1所述的agv智能立体停车充电库,其特征在于,
3.根据权利要求2所述的agv智能立体停车充电库,其特征在于,
4.根据权利要求1所述的agv智能立体停车充电库,其特征在于,
5.根据权利要求1所述的agv智能立体停车充电库,其特征在于,
6.根据权利要求5所述的agv智能立体停车充电库,其特征在于,
7.根据权利要求1所述的agv智能立体停车充电库,其特征在于,
8.根据权利要求1所述的agv智能立体停车充电库,其特征在于,
9.根据权利要求1所述的agv智能立体停车充电库,其特征在于,
10.根据权利要求1所述的agv智能立体停车充电库,其特征在于,
技术总结
本发明公开了一种AGV智能立体停车充电库,包括:支撑架、导轨、转动件、支撑块、支撑轴、托盘组件;支撑架上还设有:驱动组件和分度盘;驱动组件的输出端连接至分度盘以带动分度盘进行转动;分度盘形成有多个驱动槽;分度盘在转动时,多个驱动槽中始终有一个与多个支撑轴中的一个保持啮合以驱动支撑轴绕导轨的中轴线转动;托盘组件安装有充电组件;支撑架形成有入口;入口的两侧设有检测器;支撑架内还设有用于接受信号并对信号进行处理以控制驱动组件和充电组件进行运行的控制器;AGV智能立体停车充电库还包括用于引导AGV驶入支撑托盘的导航装置。本发明的AGV智能立体停车充电库能够节约充电空间,提高充电效率。
技术研发人员:杜相泉,李卫君
受保护的技术使用者:浙江迈睿机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!