一种气泡水平仪校准方法、系统、装置及存储介质与流程
[0001]
本发明涉及水平仪校准领域,尤其涉及一种气泡水平仪校准方法、系统、装置及存储介质。
背景技术:
[0002]
现今水平仪校准工作时,都需要人工查看刻度的同时调节机械手轮的转动,由杠杆螺丝副式装置将手轮转动角度转化为工作台的小角度倾斜来校准目标水平仪,首先依靠人工判定水平仪气泡与刻线的相对位置存在较大误差,不能保证整个检定过程中参照标准的客观一致,由此得出的检定结果自然难以客观一致,另外,一旦手轮转角过大,水泡跑过位置,往回修正位置,又不可避免的将回程误差带入系统。
技术实现要素:
[0003]
为了解决上述技术问题,本发明的目的是提供一种气泡水平仪校准方法、系统、装置及存储介质,无需依靠人工判断,使得校准结果较为客观和精确。
[0004]
本发明所采用的第一技术方案是:一种气泡水平仪校准方法,包括以下步骤:
[0005]
获取水平仪初始水泡刻度线图像并进行图像处理,得到初始水泡位置;
[0006]
驱动伺服电机转动水平仪并获取第一水平仪水泡刻度线图像,进行图像处理得到校准水泡位置;
[0007]
将校准水泡位置与初始水泡位置比较,得到第一比较结果;
[0008]
根据第一比较结果、校准转动角度和预设参数得到误差结果;
[0009]
根据误差结果对水平仪进行校准,校准完成。
[0010]
进一步,还包括:
[0011]
驱动伺服电机转动水平仪并获取第二水平仪水泡刻度线图像,进行图像处理得到验证水泡位置;
[0012]
将验证水泡位置与初始水泡位置比较,得到第二比较结果;
[0013]
根据第二比较结果、验证转动角度和预设参数对水平仪进行验证,得到验证结果。
[0014]
进一步,所述图像处理包括hsv颜色识别处理和图像二值化处理。
[0015]
进一步,所述获取水平仪初始水泡刻度线图像并进行图像处理,得到初始水泡位置这一步骤,其具体包括:
[0016]
基于摄像头获取水平仪初始水泡刻度线图像;
[0017]
对初始水泡刻度线图像进行hsv颜色识别,识别得到刻度线位置;
[0018]
对初始水泡刻度线图像进行图像二值化和形态学处理,识别得到水泡位置;
[0019]
根据刻度线位置和水泡位置得到初始水泡位置。
[0020]
进一步,所述对初始水泡刻度线图像进行hsv颜色识别,识别得到刻度线位置这一步骤,其具体包括:
[0021]
将初始水泡刻度线图像转换为hsv颜色空间并得到水泡刻度线图像在hsv颜色空
间内像素点的色调值;
[0022]
根据色调值判断出水泡刻度线的颜色和背景颜色,得到刻度线位置。
[0023]
进一步,所述对初始水泡刻度线图像进行图像二值化和形态学处理,识别得到水泡位置这一步骤,其具体包括:
[0024]
对初始水泡刻度线图像进行图像二值化处理,得到二值化后的图像;
[0025]
对二值化后的图像经过开运算去除噪声,得到去噪图像;
[0026]
对去噪图像进行形态学处理,得到水泡边缘点位置;
[0027]
根据水泡边缘点位置计算水泡中心点位置,得到水泡位置。
[0028]
进一步,所述预设参数包括预设旋转角度对应的水泡移动距离,所述根据第一比较结果、校准转动角度和预设参数得到误差结果这一步骤其具体包括:
[0029]
根据第一比较结果得到水泡在刻度线上实际移动距离;
[0030]
根据旋转角度和预设旋转角度对应的水泡移动距离,得到水泡理想移动距离;
[0031]
根据水泡在刻度线上实际移动距离和水泡理想移动距离,得到误差结果。
[0032]
本发明所采用的第二技术方案是:一种气泡水平仪校准系统,包括:
[0033]
初始图像模块,用于获取水平仪初始水泡刻度线图像并进行图像处理,得到初始水泡位置;
[0034]
校准图像模块,用于驱动伺服电机转动水平仪并获取第一水平仪水泡刻度线图像,进行图像处理得到校准水泡位置;
[0035]
比较模块,用于将校准水泡位置与初始水泡位置比较,得到第一比较结果;
[0036]
误差模块,用于根据第一比较结果、校准转动角度和预设参数得到误差结果;
[0037]
校准模块,用于根据误差结果对水平仪进行校准,校准完成。
[0038]
本发明所采用的第三技术方案是:一种气泡水平仪校准装置,包括:
[0039]
至少一个处理器;
[0040]
至少一个存储器,用于存储至少一个程序;
[0041]
当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现所述一种气泡水平仪校准方法。
[0042]
本发明方法、系统、装置及存储介质的有益效果是:本发明基于摄像头和图像处理的视觉系统对刻度线和水泡位置进行视觉识别,减少因人为观察而造成的误差,基于伺服电机转动水平仪,进一步避免人工操作带来的误差。
附图说明
[0043]
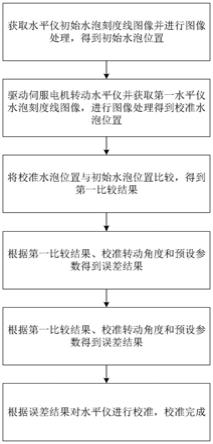
图1是本发明一种气泡水平仪校准方法的步骤流程图;
[0044]
图2是本发明一种气泡水平仪校准系统的结构框图;
[0045]
图3是本发明具体实施例中的校准设备结构图。
[0046]
附图标记:1、摄像头;2、水平仪;3、伺服电机。
具体实施方式
[0047]
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各
步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
[0048]
参照图1,本发明提供了一种气泡水平仪校准方法,该方法包括以下步骤:
[0049]
s1、获取水平仪2初始水泡刻度线图像并进行图像处理,得到初始水泡位置;
[0050]
s2、驱动伺服电机3转动水平仪2并获取第一水平仪水泡刻度线图像,进行图像处理得到校准水泡位置;
[0051]
s3、将校准水泡位置与初始水泡位置比较,得到第一比较结果;
[0052]
s4、根据第一比较结果、校准转动角度和预设参数得到误差结果;
[0053]
s5、根据误差结果对水平仪2进行校准,校准完成;
[0054]
具体地,校准过程中的刻度比对、气泡位置均是由摄像头获取图像后进行图像处理得出,无需人为判断,减少由于人工操作带来的误差。
[0055]
进一步作为本方法的优选实施例,还包括:
[0056]
驱动伺服电机转动水平仪2并获取第二水平仪水泡刻度线图像,进行图像处理得到验证水泡位置;
[0057]
将验证水泡位置与初始水泡位置比较,得到第二比较结果;
[0058]
根据第二比较结果、验证转动角度和预设参数对水平仪进行验证,得到验证结果。
[0059]
具体地,参照图3,摄像头1安装在水平仪2上方,通过摄像头1获取水平仪2的水泡刻度线图像,驱动伺服电机3能够使水平仪2按预设规则转动对应的倾斜角度。
[0060]
进一步作为本方法的优选实施例,所述图像处理包括hsv颜色识别处理和图像二值化处理。
[0061]
具体地,相比与rgb识别颜色,hsv颜色识别的准确度更高,hsv中对颜色的掌控只有h这个值,所以当h的区间定了,该颜色基本就定了;图像二值化就是将图像上的像素点的灰度值设置为0或255,有助于机器识别图像。
[0062]
进一步作为本方法优选实施例,所述获取水平仪初始水泡刻度线图像并进行图像处理,得到初始水泡位置这一步骤,其具体包括:
[0063]
基于摄像头1获取水平仪2初始水泡刻度线图像;
[0064]
对初始水泡刻度线图像进行hsv颜色识别,识别得到刻度线位置;
[0065]
对初始水泡刻度线图像进行图像二值化和形态学处理,识别得到水泡位置;
[0066]
根据刻度线位置和水泡位置得到初始水泡位置。
[0067]
进一步作为本方法优选实施例,所述对初始水泡刻度线图像进行hsv颜色识别,识别得到刻度线位置这一步骤,其具体包括:
[0068]
将初始水泡刻度线图像转换为hsv颜色空间并得到水泡刻度线图像在hsv颜色空间内像素点的色调值;
[0069]
根据色调值判断出水泡刻度线的颜色和背景颜色,得到刻度线位置。
[0070]
进一步作为本方法优选实施例,所述对初始水泡刻度线图像进行图像二值化和形态学处理,识别得到水泡位置这一步骤,其具体包括:
[0071]
对初始水泡刻度线图像进行图像二值化处理,得到二值化后的图像;
[0072]
对二值化后的图像经过开运算去除噪声,得到去噪图像;
[0073]
对去噪图像进行形态学处理,得到水泡边缘点位置;
[0074]
根据水泡边缘点位置计算水泡中心点位置,得到水泡位置。
[0075]
进一步作为本方法的优选实施例,所述预设参数包括预设旋转角度对应的水泡移动距离,所述根据第一比较结果、校准转动角度和预设参数得到误差结果这一步骤其具体包括:
[0076]
根据第一比较结果得到水泡在刻度线上实际移动距离;
[0077]
根据旋转角度和预设旋转角度对应的水泡移动距离,得到水泡理想移动距离;
[0078]
根据水泡在刻度线上实际移动距离和水泡理想移动距离,得到误差结果。
[0079]
具体地,预设参数即每转动多少倾斜度,气泡在刻度线上的移动距离是多少。
[0080]
如图2所示,一种气泡水平仪校准系统,包括:
[0081]
初始图像模块,用于获取水平仪初始水泡刻度线图像并进行图像处理,得到初始水泡位置;
[0082]
校准图像模块,用于驱动伺服电机转动水平仪并获取第一水平仪水泡刻度线图像,进行图像处理得到校准水泡位置;
[0083]
比较模块,用于将校准水泡位置与初始水泡位置比较,得到第一比较结果;
[0084]
误差模块,用于根据第一比较结果、校准转动角度和预设参数得到误差结果;
[0085]
校准模块,用于根据误差结果对水平仪进行校准,校准完成。
[0086]
上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0087]
一种气泡水平仪校准装置:
[0088]
至少一个处理器;
[0089]
至少一个存储器,用于存储至少一个程序;
[0090]
当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如上所述一种气泡水平仪校准方法。
[0091]
上述方法实施例中的内容均适用于本装置实施例中,本装置实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0092]
一种存储介质,其中存储有处理器可执行的指令,其特征在于:所述处理器可执行的指令在由处理器执行时用于实现如上所述一种气泡水平仪校准方法。
[0093]
上述方法实施例中的内容均适用于本存储介质实施例中,本存储介质实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0094]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1