自动线径定位绕线系统的制作方法
[0001]
本实用新型涉及一种绕线系统,且特别涉及一种自动线径定位绕线系统。
背景技术:
[0002]
现有的马达定子的绕线设备对于精准控制导线的绕线位置仍有不足之处,使得绕线工艺良率的提升遇到瓶颈。若遇需高品质绕线工艺的产品,其生产及品质控管的成本将会难以控制。因此,需开发更高品质的绕线设备以符合高端绕线工艺产品的需求。
技术实现要素:
[0003]
因此,本实用新型的一目的在于提供一种自动线径定位绕线系统,提高绕线工艺产品的品质。
[0004]
为达上述目的,本实用新型提供一种自动线径定位绕线系统,其包含:
[0005]
一绕线信号传送单元,传送一绕线信号;
[0006]
一绕线模块,包含:
[0007]
一绕线头,用以输出一导线;
[0008]
一绕线驱动装置;及
[0009]
一转动部,耦接该绕线驱动装置及该绕线头;
[0010]
一夹持机构,用以固定一待绕线物;以及
[0011]
一绕线定位模块,包含:
[0012]
一线径定位机构;及
[0013]
一信号接收单元;
[0014]
其中,当该信号接收单元收到该绕线信号时,该绕线模块将该导线定位至该待绕线物的绕线入线端,并沿着该线径定位机构滑至该待绕线物的绕线槽,该绕线驱动装置驱动该转动部引导该绕线头对该待绕线物的绕线槽进行定位绕线。
[0015]
上述的自动线径定位绕线系统,其中该线径定位机构包含:
[0016]
一第一绕线推板以及该第一绕线推板所延伸一第一导引端;以及
[0017]
一第二绕线推板以及该第二绕线推板所延伸一第二导引端,
[0018]
其中该导线接触该第一导引端沿着该第一绕线推板滑至该待绕线物的绕线槽的一端绕线到另一端,并接触该第二导引端沿着该第二绕线推板滑至该待绕线物的绕线槽。
[0019]
上述的自动线径定位绕线系统,其中该线径定位机构更包含:
[0020]
一第一高度调整机构,其耦接该第一绕线推板;以及
[0021]
一第二高度调整机构,其耦接该第二绕线推板,
[0022]
其中该第一高度调整机构以及该第二高度调整机构根据该导线的线径及绕线匝数调整该第一绕线推板以及该第二绕线推板的位置。
[0023]
上述的自动线径定位绕线系统,其中:
[0024]
该第一绕线推板具有一第一导引线槽沟,该第一导引线槽沟与该第一导引端分别
位于该第一绕线推板的两相对端;以及
[0025]
该第二绕线推板具有一第二导引线槽沟,该第二导引线槽沟与该第二导引端分别位于该第二绕线推板的两相对端,
[0026]
其中该导线沿着该第一或第二绕线推板滑至该第一或第二导引线槽沟作定位绕线。
[0027]
上述的自动线径定位绕线系统,其中:
[0028]
该第一绕线推板具有一第一底端面,其连接该第一导引线槽沟;以及
[0029]
该第二绕线推板具有一第二底端面,其连接该第二导引线槽沟,其中该第一底端面与该第二底端面于绕线时抵压下层已完成的绕线。
[0030]
上述的自动线径定位绕线系统,其中该第一底端面的宽度大于该导线的线径,该第二底端面的宽度大于该导线的线径。
[0031]
上述的自动线径定位绕线系统,其中该绕线定位模块更包含:
[0032]
一水平旋转轴,其耦接于该线径定位机构;
[0033]
其中,当该绕线模块于该待绕线物的绕线槽内完成一第一层绕线时,该绕线定位模块藉该水平旋转轴相对该待绕线物旋转一角度,使该线径定位机构的该第一或第二绕线推板朝向相反方向以进行第二层绕线。
[0034]
上述的自动线径定位绕线系统,其中更包含:
[0035]
一旋转驱动装置,其耦接于该夹持机构;
[0036]
其中,该旋转驱动装置根据该转动部的一旋转方向,以相反的旋转方向旋转该夹持机构以加速绕线。
[0037]
综合以上,本实用新型所提出的自动线径定位绕线系统就针对各种绕线需求客制化其绕线工艺参数,且整体模块具有多轴旋转的功能,亦能达到整齐且紧实的绕线成果。
[0038]
以下结合附图和具体实施例对本实用新型进行详细描述,但不作为对本实用新型的限定。
附图说明
[0039]
为让本实用新型的上述和其他目的、特征、优点与实施例能更明显易懂,所附的附图的详细说明如下:
[0040]
图1绘示根据本实用新型的一实施例所述的自动线径定位绕线系统的侧视图;
[0041]
图2绘示根据本实用新型的一另一实施例所述的自动线径定位绕线系统的侧视图;
[0042]
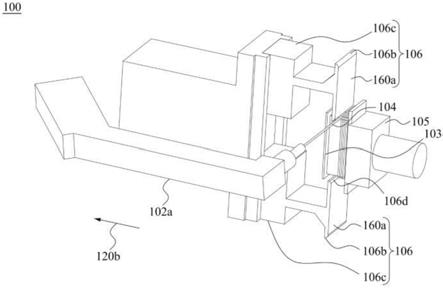
图3绘示根据本实用新型的一实施例所述的自动线径定位绕线系统的立体图;
[0043]
图4绘示图3的a部分的放大图;
[0044]
图5绘示根据本实用新型的一另一实施例所述的自动线径定位绕线系统的立体图;
[0045]
图6绘示根据本实用新型的一再一实施例所述的自动线径定位绕线系统的立体图;以及
[0046]
图7绘示根据本实用新型的自动线径定位绕线系统的绕线方法流程。
[0047]
其中,附图标记
[0048]
100:自动线径定位绕线系统
[0049]
102:绕线模块
[0050]
102a:绕线头
[0051]
102b:绕线驱动装置
[0052]
102c:转动部
[0053]
103:待绕线物
[0054]
103a:绕线槽
[0055]
104:导线
[0056]
105:夹持机构
[0057]
106:绕线定位模块
[0058]
106a:绕线推板
[0059]
106b:导引端
[0060]
106c:高度调整机构
[0061]
106d:导引线槽沟
[0062]
106e:底端面
[0063]
107:水平旋转轴
[0064]
108:旋转驱动装置
[0065]
108a:转轴
[0066]
110:绕线信号传送单元
[0067]
112:信号接收单元
[0068]
120a:绕线方向
[0069]
120b:绕线方向
[0070]
200:流程
[0071]
202~214:步骤
具体实施方式
[0072]
本实用新型的一目的是提供自动线径定位绕线系统,使绕线的工艺能因应线径或线种不同而能即时调整,且导线能整齐且紧实的缠绕于线槽内。
[0073]
请参照图图1,其绘示根据本实用新型的一实施例所述的自动线径定位绕线系统的侧视图。本实用新型的自动线径定位绕线系统100包含一绕线信号传送单元110、一绕线模块102、一夹持机构105以及一绕线定位模块106。绕线定位模块106包含一线径定位机构以及一信号接收单元112。当信号接收单元112收到绕线信号传送单元110所发出的绕线信号时,绕线模块102将导线104定位至待绕线物103的绕线入线端,并沿着线径定位机构滑至待绕线物103的绕线槽103a作定位绕线。待绕线物103可以例如是马达的定子或其他电感元件。
[0074]
在本实用新型的实施例中,绕线模块102包含绕线头102a、绕线驱动装置102b以及转动部102c。绕线头102a作为导线104的输出端。转动部102c耦接于绕线驱动装置102b及绕线头102a之间。当执行绕线时,绕线驱动装置102b驱动转动部102c相对于待绕线物103的绕线槽103a旋转而进行绕线。绕线驱动装置102b可以例如是一马达或其他能产生旋转运动的
装置。
[0075]
在本实用新型的实施例中,信号接收单元112连接至绕线模块102、夹持机构105以及绕线定位模块106。绕线信号传送单元110亦连接至信号接收单元112而作为绕线工艺的控制器。绕线信号传送单元110可以例如是一可程序控制器或其他种类的控制器。
[0076]
在本实用新型的实施例中,绕线定位模块106包含至少一绕线推板106a,而绕线推板106a具有一底端面106e。底端面106e于绕线时藉下述高度调整机构带动的抵压下层已完成的绕线。
[0077]
在本实用新型的实施例中,底端面106e的宽度大于导线104的线径,但不以此为限。例如,底端面106e的宽度可大于导线104的线径的两倍,在绕线同时抵压下层已完成的绕线,使导线能整齐且紧实的缠绕于绕线槽103a内。
[0078]
请同时参照图图1、图2,图2绘示根据本实用新型的一另一实施例所述的自动线径定位绕线系统的侧视图。图1、图2的差异之一在于绕线定位模块106于系统内的位置不同,为因应绕线方向而使两图中的绕线定位模块106成镜像对称。
[0079]
在本实用新型的实施例中,绕线定位模块106更包含一水平旋转轴107,使绕线定位模块106藉其旋转一角度(例如180度)而能达成上述两图中绕线定位模块106成镜像对称的状况。当绕线模块102于待绕线物103的绕线槽103a内完成一第一层绕线(例如图中的底层绕线)时,绕线定位模块106藉水平旋转轴107相对待绕线物103旋转一角度(例如180度),使绕线推板106a朝向相反方向以进行第二层绕线(例如图中的上层绕线)。
[0080]
在本实用新型的实施例中,自动线径定位绕线系统更包含一旋转驱动装置108,其藉转轴108a耦接于夹持机构105。当绕线时,旋转驱动装置108根据转动部102c的一旋转方向,以相反的旋转方向旋转夹持机构105以加速绕线。
[0081]
请同时图3、图4,图3绘示根据本实用新型的一实施例所述的自动线径定位绕线系统的立体图;图4绘示图3的a部分的放大图。a部分为线径定位机构的上半部。
[0082]
在本实用新型的实施例中,绕线定位模块106包含一线径定位机构以及一信号接收单元112。线径定位机构包含一第一绕线推板106a以及第一绕线推板所延伸一第一导引端106b、一第二绕线推板106a以及第二绕线推板所延伸一第二导引端106b。第一绕线推板106a与第二绕线推板106a于图3中彼此上下镜像对称,而第一导引端106b与第二导引端106b于图3中彼此上下镜像对称。
[0083]
在本实用新型的实施例中,当绕线时,导线104输出后接触第一导引端106b沿着第一绕线推板106a(线径定位机构的上半部)滑至待绕线物103的绕线槽的一端绕线到另一端,并接触第二导引端106b沿着第二绕线推板106a(线径定位机构的下半部)滑至待绕线物103的绕线槽。
[0084]
在本实用新型的实施例中,线径定位机构更包含一第一高度调整机构106c(线径定位机构的上半部)以及一第二高度调整机构106c(线径定位机构的下半部)。第一高度调整机构106c耦接第一绕线推板106a。第二高度调整机构106c耦接第二绕线推板106a。第一高度调整机构106c以及第二高度调整机构106c根据导线104的线径及绕线匝数调整第一绕线推板106a以及第二绕线推板的位置106a。第一或第二高度调整机构106c可配合马达带动及/或滑槽的机构,可程序的调整绕线定位模块106的高度,使其能因应不同的导线的线径、匝数所需的高度。
[0085]
在本实用新型的实施例中,第一绕线推板106a具有一第一导引线槽沟106d,第一导引线槽沟106d与第一导引端106b分别位于第一绕线推板106a的两相对端(请参照图4)。相同的,第二绕线推板106a具有一第二导引线槽沟106d,第二导引线槽沟106d与第二导引端106b分别位于第二绕线推板106a的两相对端(图中未明显绘示)。导线104沿着第一或第二绕线推板106a滑至第一或第二导引线槽沟106d作定位绕线。第一或第二导引线槽沟106d可配合各种线径或线种更换治具,例如适合圆线或方线的治具皆可。
[0086]
请参照图5,其绘示根据本实用新型的一另一实施例所述的自动线径定位绕线系统的立体图。图3、图5的差异的一在于绕线定位模块106于系统内的位置不同,为因应绕线方向而使两图中的绕线定位模块106成镜像对称。具体而言,当以绕线方向120a执行绕线时(即导线104由左至右依序绕线),绕线定位模块106位于待绕线物103的右侧(如图3所示的位置),使绕线能顺利的执行;当以绕线方向120b执行绕线时(即导线104由右至左依序绕线),绕线定位模块106位于待绕线物103的左侧(如图5所示的位置),使绕线能顺利的执行。绕线定位模块106于图3、图5的位置成镜像对称的状况。
[0087]
请参照图6,其绘示根据本实用新型的一再一实施例所述的自动线径定位绕线系统的立体图。除了上述实施例的绕线定位模块106与待绕线物103的位置关系(即水平夹持与绕线的位置关系)外,绕线定位模块106与待绕线物103亦可如图6所绘示的上、下的位置关系(即垂直夹持与绕线的位置关系)。自动线径定位绕线系统100提供多轴旋转的功能,使绕线定位模块106、待绕线物103以及绕线模块102能具有更多种位置关系,以满足更多种客制化的绕线工艺需求。
[0088]
请参照图7,其绘示根据本实用新型的自动线径定位绕线系统的绕线方法流程200。在流程200的步骤202中,机台开机自动预校正以确保绕线的准确度。
[0089]
在流程200的步骤204中,可依上述导线104的型号、线径以及绕线匝数作参数设定。
[0090]
在流程200的步骤206中,自动线径定位绕线系统会列出多个绕线执行时可客制化的工艺供使用者选择或确认。
[0091]
在流程200的步骤208a中,系统显示出绕线模块的绕线起始等待点供使用者选择或确认。
[0092]
在流程200的步骤208b中,系统显示出绕线定位模块的绕线起始等待点供使用者选择或确认。
[0093]
在流程200的步骤210中,所有导线的参数设定以及选择或确认事项完成后即可开始绕线。
[0094]
在流程200的步骤212a中,绕线定位模块106随着绕线模块102的绕线进度移动。
[0095]
在流程200的步骤212b中,绕线定位模块106藉其高度调整机构106c调整与待绕线物103的高度差,或绕线定位模块106藉其水平旋转轴107切换位于待绕线物103的左、右侧。在本实用新型的实施例中(请同时参照图1~图5),于待绕线物103的绕线槽103a完成第一层绕线后,第一或第二绕线推板106a导引导线104于第一层绕线上进行第二层绕线时,同时以其第一或第二底端面106e抵压第一层绕线,使导线能整齐且紧实的缠绕于绕线槽内。
[0096]
在上述步骤适当完成后即可到达流程200的步骤214。
[0097]
综合以上,本实用新型所提出的自动线径定位绕线系统就针对各种绕线需求客制
化其绕线工艺参数,且整体模块具有多轴旋转的功能,亦能达到整齐且紧实的绕线成果。
[0098]
当然,本实用新型还可有其它多种实施例,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员当可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1