一种锡精炼过程锡精炼锅自动捞渣装置的制作方法
[0001]
本实用新型涉及锡冶炼辅助装置技术领域,具体涉及一种锡精炼过程的锡精炼锅捞渣装置。
背景技术:
[0002]
锡冶炼过程中粗锡精炼有火法精炼和湿法精炼两种,火法精炼生产效率高,锡周转快,设备简单,但生产流程长,劳动条件较差;湿法精炼流程短,锡回收率高,但锡周转慢,占用资金大,设备占地面积大,且难于选择一种完全符合生产的电解液,因此国内外锡冶炼厂广泛应用火法精炼。
[0003]
火法精炼是利用锡与杂质对氧、硫和氯的亲和力的区别,以及锡与杂质生成不溶于液体的化合物试剂作用,生成的化合物杂质浮在液体锡上,以固体或黏性、粉状产物形式从金属表面捞去,达到精炼的目的。但是火法精炼过程每道作业只能除去一种或几种杂质,而有的杂质要在几道作业中逐步除去,产生的渣量大,渣的种类多。
[0004]
捞渣作业在火法精炼过程中是一道必不可少的作业,捞渣作业劳动强度大,作业环境差。现有的捞渣设备普遍占地面积大,笨重,捞渣效率低。因此,研究开发自动化程度高、捞渣效率高的捞渣装置,是目前亟需解决的问题。
技术实现要素:
[0005]
本实用新型的目的是解决上述现有技术存在的问题,提供一种自动化程度高、安全、高效、实用的锡精炼过程锡精炼锅自动捞渣装置。
[0006]
为实现上述目的,本实用新型采用如下技术方案:
[0007]
一种锡精炼过程锡精炼锅自动捞渣装置,所述自动捞渣装置包含底座、安装于底座上的由自动控制系统控制操作的机械手、安装于机械手前端的竖直的吊臂、安装于吊臂底端的捞渣勺、竖直设置于捞渣勺旁且通过悬臂安装于吊臂上的液位探针;所述吊臂包括竖直的空心臂杆、安装于空心臂杆上部的侧伸外壳、机体安装于侧伸外壳内且输出轴水平伸入到空心臂杆内的吊臂驱动电机、设置于空心臂杆内上部且安装于吊臂驱动电机输出轴上的上链轮、设置于空心臂杆内下部的下链轮、套装于上链轮和下链轮上的传动链、焊接于空心臂杆顶端的连接板;所述捞渣勺包括穿过空心臂杆下部的渣斗连轴、安装于渣斗连轴两端的渣斗吊板、安装于渣斗吊板下部的漏勺;所述下链轮套装在渣斗连轴上的中间位置;所述液位探针设置有相互平行且底端探入深度不同的两根探针,每根探针的顶部分别接有探针导线;所述吊臂驱动电机和探针导线均与自动控制系统电连接。
[0008]
与现有技术先比,本实用新型的主要优点在于:
[0009]
1、本实用新型自动化程度高,操作灵活,设备占地面积小,捞渣方法简单,捞渣效率高;
[0010]
2、捞渣装置带有液位探针,可控制捞渣勺的下插深度,不仅捞渣效率高,而且可有效减少锡液损失;
[0011]
3、使用本实用新型装置,不再需要人工捞渣,减轻了工人劳动强度,并避免了烫伤风险。
附图说明
[0012]
图1是本实用新型的自动捞渣装置的示意图;
[0013]
图2是吊臂剖开的内部结构及吊臂连接在机械手前端的示意图;
[0014]
图3是图2中吊臂以下部分的右视图。
具体实施方式
[0015]
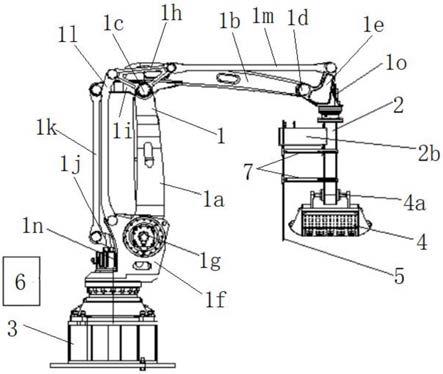
如图1所示,一种锡精炼过程锡精炼锅自动捞渣装置,包含底座3、安装于底座上的机械手1、安装于机械手前端的吊臂2、安装于吊臂底端的捞渣勺4、设置于捞渣勺旁的竖直的液位探针5。所述机械手由自动控制系统6控制操作。所述吊臂2结构如图2所示,包括竖直的空心臂杆2a、安装于空心臂杆内的链传动机构。在空心臂杆上部一侧安装有侧伸外壳2b,在侧伸外壳内安装有吊臂驱动电机2c,吊臂驱动电机的输出轴水平伸入到空心臂杆2a内。所述链传动机构包括设置于空心臂杆2a上部且安装于吊臂驱动电机输出轴上的上链轮2d、设置于空心臂杆2a内下部的下链轮2e、套装于上链轮和下链轮上的传动链2f,在空心臂杆顶端焊接有连接板2g,所述连接板与机械手的前端通过螺栓连接。所述捞渣勺4包括横向穿过空心臂杆下部的渣斗连轴4a、安装于渣斗连轴两端的渣斗吊板4b、固定安装于两端渣斗吊板下部的漏勺4c,所述下链轮2e套装在渣斗连轴上的中间位置。所述漏勺上带有密布的漏液孔4d。如图2、图3所示,在吊臂上安装有悬臂7,所述液位探针5安装在悬臂7上。液位探针5设置有相互平行且底端探入深度不同的两根,一根探针较长,用于探测捞渣勺的下潜深度;另一根探针较短,起限位作用,控制捞渣勺的最大下潜深度。每根探针的顶部分别接有探针导线5a。液位探针采用耐高温的不锈钢探针,探针导线5a与自动控制系统6电连接。所述吊臂驱动电机也与自动控制系统6电连接。
[0016]
所述机械手1及其自动控制系统6采用现有技术设备,可以直接市购。图1、图2所示为一种结构形式的机械手,该机械手包括有通过第一关节1c连接的大臂1a和小臂1b,通过第二关节1d连接于小臂前端的拐臂1e,安装于底座3上的大臂支座1f,所述大臂的底端安装于大臂支座上。在第一关节1c上还安装有三角形连杆架1h和附助连杆1i,在大臂支座上安装有辅助支杆1j,在辅助支杆和辅助连杆之间铰连接有第一连杆1k,在大臂支座1f和三角形连杆架1h之间铰连接有第二连杆1l,在三角形连杆架和拐臂之间铰连接有第三连杆1m,在大臂支座上安装有用于驱动大臂支座沿底座3转动的支座伺服电机1n和用于驱动大臂动作的大臂伺服电机1g,在拐臂上安装有驱动小臂动作的小臂伺服电机1o,所述支座伺服电机、大臂伺服电机、小臂伺服电机均由自动控制系统6控制启停。所述吊臂顶端的连接板2g连接于拐臂1e的拐部底端。机械手还可以采用其他结构形式。
[0017]
采用本实用新型所述锡精炼过程锡精炼锅自动捞渣装置的捞渣方法如下:将自动捞渣装置固定在锡精炼锅边缘,通过自动控制系统6控制机械手1动作,将捞渣勺4伸入锡精炼锅中并下插至锡液液面下,通过液位探针5控制捞渣勺下插的深度,当液位探针下插至控制系统预设的锡液液面浮渣深度时,自动控制系统启动吊臂驱动电机2c正转,由此驱动上链轮2d,通过传送链2f带动下链轮2e及渣斗连轴4a同步转动,从而带动漏勺4c正向转动,将
浮渣捞起;当漏勺转至勺口朝上时,吊臂驱动电机2c停止,随后自动控制系统控制机械手动作,将捞渣勺提升至离开锡液,捞渣勺中带起的锡液通过漏勺上的漏孔漏下至锡精炼锅中,漏勺位置高过锡精炼锅锅沿时,机械手动作,将捞渣勺转移到位于渣斗上方,然后吊臂驱动电机2c反转,带动漏勺4c反转,将渣倒出至渣斗中;如此反复动作,直至完成锡精炼锅内的浮渣自动捞渣作业。液位探针下插至锡液液面浮渣的深度可根据锡精炼锅的浮渣量通过自动控制系统进行预设和调节控制。
[0018]
对应图1所示的机械手,通过自动控制系统控制支座伺服电机的启停,可以实现大臂在底座3上的转动和停止,并控制大臂的转动角度。通过控制大臂伺服电机,可以控制大臂的伸展和回收,通过控制小臂伺服电机,可以控制小臂的动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1