一种自动化收获机
1.本发明涉及自动化收获设备技术领域,具体涉及一种自动化收获机。
背景技术:
2.扫帚高粱主要用于手工艺和编织业,秆茎植株高大且柔韧性较高,具有较高的经济价值,在对其进行田间收获作业时,现已普遍采用自动化收获设备完成,但是时下已有在保证柔韧性的同时还兼具子粒高产的优质杂交高粱,且已经大量种植,若依然采用现有的自动化收获设备已无法满足对杂交高粱的有效自动化收获。
3.现有技术在对杂交高粱收获的过程中,发现仍存在一定的弊端:一、使用食用高粱用的收获机进行收获,收获颖果的过程中会打碎茎秆,无法取得所要留下的茎秆,而使用扫帚高粱用的收获机进行收获,又无法对穗上的颖果进行收获,同时由于上端的种穗体积较大,在设备内相应的储存区会出现穗茎均朝向一边倒的现象,导致空间占用率不高,收获过程中每隔一段时间便需要人工调转茎穗朝向;二、由于杂交高粱的长势不可能保持同一高度,采用现有的固定高度切割的方式,所得到的茎秆长度长短不一,且对于长度不合格的茎秆无法发挥其经济价值只能抛弃,会对种植农户造成一定程度的经济损失。
技术实现要素:
4.本发明的目的在于提供一种自动化收获机,以解决现有技术中导致的上述缺陷。
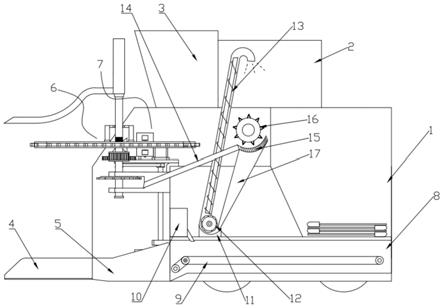
5.一种自动化收获机,包括自走车、储粮仓以及驾驶舱,所述储粮仓和驾驶舱均设置于自走车的上端,还包括导向部、割断台、定长切断机构以及交错分秸机构,所述自走车的下部为排料通道,所述排料通道的内部安装有输送带,排料通道的上端安装有送风机和集料槽,自走车内于集料槽的上方安装有辊筒,自走车内于辊筒的末端安装有输料提升筒,自走车内还固定有送料板,所述送料板的端部连接有筛网,所述筛网的上方安装有脱粒辊,筛网的下端连接有落料腔并搭接于集料槽内,所述割断台安装于自走车前进方向的下部,所述导向部通过连接座固定于割断台上,所述定长切断机构安装于自走车上,并用于对扫帚高粱的茎穗进行固定长度的切断,所述交错分秸机构安装于定长切断机构上,并用于对切断好的茎穗进行反向相反的往复拨动。
6.优选的,所述定长切断机构包括驱动电机、导料曲轨以及切断刀一,所述驱动电机通过安装座安装于自走车上,驱动电机的输出端连接有转轴,所述转轴上还固定安装有带轮一,所述安装座上还安装有齿轮一,所述齿轮一的下端同轴连接有带轮二,所述带轮二通过传动带与带轮一相连,自走车内通过两个对称设置的固定台滑动连接有轴杆,所述导料曲轨转动连接于轴杆的上端,所述切断刀一固定安装于轴杆上并置于固定台的内侧,固定台的上端通过导向座固定连接有安装盘,所述安装盘上安装有拨料带,轴杆的中部开设有周向设置的齿槽,所述齿槽上啮合有齿轮二,所述齿轮二与拨料带的内侧相啮合,轴杆上于固定台与安装盘之间固定安装有齿轮三,所述齿轮三与齿轮一相啮合,安装盘的上端固定有支撑架,所述安装架上固定有两个对称设置的导向杆,所述导向杆与导料曲轨滑动连接,
导向杆上于导料曲轨与支撑架之间套设有弹簧。
7.优选的,所述交错分秸机构包括拨料杆、拉簧以及齿轮四,所述拨料杆有两个并分别反向滑动设置于导向座内,拨料杆的上端中部固定连接有定位柱,所述定位柱与拉簧的一端相固定连接,拉簧的另一端固定于导向座的侧端上,所述齿轮四通过安装块设置于安装座上,拨料杆的下端安装有齿条,所述齿条与齿轮四相啮合,安装块上于齿轮四的另一端同轴安装有伞齿轮一,所述伞齿轮一上啮合有伞齿轮二,所述伞齿轮二同轴安装于齿轮一的上端。
8.优选的,所述割断台上通过连接座转动连接有切断刀二,所述切断刀二固定安装于转轴上。
9.优选的,所述送风机的出风口伸入到排料通道内,并向自走车的行进反方向倾斜。
10.优选的,所述导向杆的上部为螺纹设置,导向杆上于导料曲轨的上下两侧均螺纹连接有锁紧螺母。
11.优选的,两个所述拨料杆的两端部侧端均为内凹设置,且两个所述拨料杆分别位于拨料带的上方和下方。
12.优选的,两个所述拨料杆的两个伸出端在自走车的行进方向上均超过导料曲轨。
13.本发明的优点在于:(1)通过在自走车上设置定长切断机构,植株经一定上升弧度的曲面移至导料曲轨最高点,再经切断刀一切断后完成对所需茎穗的切割,当遇到长势较矮的扫帚高粱时,上端的种穗由于个体较大,会卡在导料曲轨的中部缺口上端,随着收获机的继续前进对导料曲轨产生下压的效果,导料曲轨和切断刀一同步升降的效果,使得对长势高矮不同的高粱植株均能进行相同长度的切断;
14.(2)通过设置配合定长切断机构的交错分秸机构,对于切断后的茎穗在进入自走车内的过程中,两侧的茎穗进行相反方向的转动,从而进到送料板上的茎穗为相互错位并反向的码放状态,脱粒后可堆叠慢整个仓储腔室,防止发生因茎穗朝向一侧而导致储存区域空间利用率低下的现象。
附图说明
15.图1为本发明的结构示意图。
16.图2为本发明中定长切断机构的结构示意图。
17.图3为本发明中导向杆的内部剖视图。
18.图4为本发明中定长切断机构和交错分秸机构中部分结构的装配示意图。
19.图5为本发明中定长切断机构和交错分秸机构中部分结构的侧视图。
20.图6为本发明中齿轮四的结构示意图。
21.图7为本发明中部分结构的结构示意图。
22.其中,1
‑
自走车,2
‑
储粮仓,3
‑
驾驶舱,4
‑
导向部,5
‑
割断台,6
‑
定长切断机构,7
‑
交错分秸机构,8
‑
排料通道,9
‑
输送带,10
‑
送风机,11
‑
集料槽,12
‑
辊筒,13
‑
输料提升筒,14
‑
送料板,15
‑
筛网,16
‑
脱粒辊,17
‑
落料腔,18
‑
连接座,19
‑
切断刀二,601
‑
驱动电机,602
‑
导料曲轨,603
‑
切断刀一,604
‑
安装座,605
‑
转轴,606
‑
带轮一,607
‑
齿轮一,608
‑
带轮二,609
‑
传动带,610
‑
固定台,611
‑
轴杆,612
‑
导向座,613
‑
安装盘,614
‑
拨料带,615
‑
齿槽,616
‑
齿轮二,617
‑
齿轮三,618
‑
支撑架,619
‑
导向杆,620
‑
弹簧,701
‑
拨料杆,702
‑
拉簧,703
‑
齿轮四,
704
‑
定位柱,705
‑
安装块,706
‑
齿条,707
‑
伞齿轮一,708
‑
伞齿轮二。
具体实施方式
23.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
24.如图1至图7所示,一种自动化收获机,包括自走车1、储粮仓2以及驾驶舱3,所述储粮仓2和驾驶舱3均设置于自走车1的上端,还包括导向部4、割断台5、定长切断机构6以及交错分秸机构7,所述自走车1的下部为排料通道8,所述排料通道8的内部安装有输送带9,排料通道8的上端安装有送风机10和集料槽11,自走车1内于集料槽11的上方安装有辊筒12,自走车1内于辊筒12的末端安装有输料提升筒13,自走车1内还固定有送料板14,所述送料板14的端部连接有筛网15,所述筛网15的上方安装有脱粒辊16,筛网15的下端连接有落料腔17并搭接于集料槽11内,所述割断台5安装于自走车1前进方向的下部,所述导向部4通过连接座18固定于割断台5上,所述定长切断机构6安装于自走车1上,并用于对扫帚高粱的茎穗进行固定长度的切断,所述交错分秸机构7安装于定长切断机构6上,并用于对切断好的茎穗进行反向相反的往复拨动。
25.在本实施例中,所述定长切断机构6包括驱动电机601、导料曲轨602以及切断刀一603,所述驱动电机601通过安装座604安装于自走车1上,驱动电机601的输出端连接有转轴605,所述转轴605上还固定安装有带轮一606,所述安装座604上还安装有齿轮一607,所述齿轮一607的下端同轴连接有带轮二608,所述带轮二608通过传动带609与带轮一606相连,自走车1内通过两个对称设置的固定台610滑动连接有轴杆611,所述导料曲轨602转动连接于轴杆611的上端,所述切断刀一603固定安装于轴杆611上并置于固定台610的内侧,固定台610的上端通过导向座612固定连接有安装盘613,所述安装盘613上安装有拨料带614,轴杆611的中部开设有周向设置的齿槽615,所述齿槽615上啮合有齿轮二616,所述齿轮二616与拨料带614的内侧相啮合,轴杆611上于固定台610与安装盘613之间固定安装有齿轮三617,所述齿轮三617与齿轮一607相啮合,安装盘613的上端固定有支撑架618,所述安装架上固定有两个对称设置的导向杆619,所述导向杆619与导料曲轨602滑动连接,导向杆619上于导料曲轨602与支撑架618之间套设有弹簧620。
26.需要说明的是,所述导料曲轨602的缺口间距与扫帚高粱的茎秆相配合,使得在秆茎顺利通过的同时,种穗还可以卡住不下落,并为后续的茎穗定长切断提供条件。
27.在本实施例中,所述交错分秸机构7包括拨料杆701、拉簧702以及齿轮四703,所述拨料杆701有两个并分别反向滑动设置于导向座612内,拨料杆701的上端中部固定连接有定位柱704,所述定位柱704与拉簧702的一端相固定连接,拉簧702的另一端固定于导向座612的侧端上,所述齿轮四703通过安装块705设置于安装座604上,拨料杆701的下端安装有齿条706,所述齿条706与齿轮四703相啮合,安装块705上于齿轮四703的另一端同轴安装有伞齿轮一707,所述伞齿轮一707上啮合有伞齿轮二708,所述伞齿轮二708同轴安装于齿轮一607的上端。
28.值得一提的是,所述齿轮四703为缺口齿轮,齿牙为两簇并对称地置于轮缘上,使得两个拨料杆701能够循环往复并方向相反的水平滑动。
29.在本实施例中,所述割断台5上通过连接座18转动连接有切断刀二19,所述切断刀
二19固定安装于转轴605上,使得高粱下端的秆茎得以均匀切断,并回归土壤再利用,提升田间土壤所需微量元素。
30.在本实施例中,所述送风机10的出风口伸入到排料通道8内,并向自走车1的行进反方向倾斜,使得切断后的秆茎持续排出设备外。
31.在本实施例中,所述导向杆619的上部为螺纹设置,导向杆619上于导料曲轨602的上下两侧均螺纹连接有锁紧螺母,使得导料曲轨602的高度可以做适应性调节,以适应不同高度的高粱均能进行有效收获。
32.在本实施例中,所述割断台5上设置有若干个对称设置的割断头,割断头位置与导向部4的进料口相对应,使得秆茎得以全部有效均匀割断。
33.在本实施例中,两个所述拨料杆701的两端部侧端均为内凹设置,且两个所述拨料杆701分别位于拨料带614的上方和下方。
34.值得注意的是,两个所述拨料杆701的两个伸出端在自走车1的行进方向上均超过导料曲轨602,使得切断后的茎穗能够顺利翻转。
35.工作过程及原理:使用本发明对扫帚高粱进行收获作业时,首先通过调节导向杆619上导料曲轨602上下两侧的锁紧螺母确定导料曲轨602的初始高度,从而确定所要收获的茎穗长度,收获机在行驶的过程中,启动驱动电机601使其输出端经转轴605带动带轮一606转动,经传动带609、带轮二608以及齿轮一607带动齿轮三617同步转动,进而经齿轮二616带动拨料带614在安装盘613上循环转动,垄间的扫帚高粱经导料曲轨602中间的导向缺口进入到导料曲轨602内,并由拨料带614拨动至自走车1内,此过程扫帚高粱先沿着一定上升弧度的曲面移至导料曲轨602最高点,经切断刀一603切断后完成对所需茎穗的切割,而下端的茎秆则经切断刀二19切碎并由送风机10从排料通道8内吹出,当遇到长势较矮的扫帚高粱时,上端的种穗由于个体较大,会卡在导料曲轨602的中部缺口上端,随着收获机的继续前进对导料曲轨602产生下压的效果,此时弹簧620在导向杆619上处于压缩状态,而齿槽615相对于齿轮二616向下移动,并保持啮合,同时齿轮三617相对于齿轮一607也向下移动相同距离,并保持啮合,进而带动切断刀一603保持高速转动的同时跟随下移,然后继续收获另一种长势高度的高粱后,在弹簧620的弹性作用下,导料曲轨602及切断刀一603的高度再次复原,以保证收获到种穗以下的茎秆始终保持一致;
36.对于切断后的茎穗,在齿轮一607的转动状态下,经伞齿轮二708、伞齿轮一707以及齿轮四703带动上下两个拨料杆701在导向座612内滑动,由于齿轮四703为对称齿牙的缺口齿轮,配合拉簧702自身弹性的拉动,使得齿轮四703在转动过程中会带动两个拨料杆701在导向座612内同步反向地伸缩,以位于上方的拨料杆701伸出状态为例(图5),此时位于下方的拨料杆701向左侧伸出,并位于拨料带614的下方,茎秆会在进入自走车1内的过程中,接触到左侧的拨料带614后,绕着与其接触的拨料带614转动,头穗部向纸面以里,茎尾端向纸面以外方向,而相对应的右侧拨料杆701则会使得茎秆绕着拨料带614反向转动,从而进到送料板14上的茎穗为相互错位并反向的码放状态,在惯性作用下进入到脱粒辊16进行脱粒;
37.最后,经脱粒辊16完成脱粒后,由筛网15筛选后的颖果经落料腔17落至集料槽11中,再经辊筒12的二次精筛由端部的输料提升筒13输送至储粮仓2内完成颖果收获,而用于制作笤帚或炊帚的糜子则保持相互错位并反向的码放状态,最大填装占比地进入到自走车
1最后端的收集腔室。
38.基于上述,本发明通过在自走车1上设置定长切断机构6,植株经一定上升弧度的曲面移至导料曲轨602最高点,再经切断刀一603切断后完成对所需茎穗的切割,当遇到长势较矮的扫帚高粱时,上端的种穗由于个体较大,会卡在导料曲轨602的中部缺口上端,随着收获机的继续前进对导料曲轨602产生下压的效果,导料曲轨602和切断刀一603同步升降的效果,使得对长势高矮不同的高粱植株均能进行相同长度的切断;
39.通过设置配合定长切断机构6的交错分秸机构7,对于切断后的茎穗在进入自走车1内的过程中,两侧的茎穗进行相反方向的转动,从而进到送料板14上的茎穗为相互错位并反向的码放状态,脱粒后可堆叠慢整个仓储腔室,防止发生因茎穗朝向一侧而导致储存区域空间利用率低下的现象。
40.由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1