机械减速齿轮及相关齿轮马达的制作方法
1.本发明涉及机械减速齿轮或减速齿轮的领域,其特别是在电动马达的输出处用于形成齿轮马达,例如在机动车辆刮水器系统中。
背景技术:
2.减速齿轮尤其用于降低转速并获得高的转弯传递扭矩。
3.现有技术中已知不同类型的减速齿轮。减速齿轮类型的选择通常与使用减速齿轮的应用相关的各种限制相关。
4.在适于设置在机动车辆上的齿轮马达的情况下,主要限制可能是齿轮马达易于安装在机动车辆中所需的小占地面积,特别是小直径。在具有减小长度的无刷电动马达的情况下,将减速齿轮布置成与马达成一直线可能是有利的,其直径不大于马达的直径,同时获得期望的减速比。对于刮水器系统,该比率通常在1:70的范围内。
5.为了在小空间中获得高减速比,已知使用摆线机械减速齿轮。然而,这些减速齿轮具有若干缺点,特别是因为构造成在外辊上滚动的偏心齿轮的轮廓必须针对每个辊和偏心齿轮的尺寸进行专门定义,这使得生产复杂且成本高昂,并且还因为由于偏心齿轮的行星旋转(因此不会绕固定轴线旋转)而很难传递输出扭矩。
技术实现要素:
6.为了至少部分地克服现有技术的这些缺点,本发明的目的是提供一种机械减速齿轮,其具有针对小占地面积的高减速比,同时允许有效地传递输出扭矩并且其生产成本受到限制。
7.为此,本发明涉及一种机械减速齿轮,包括:
8.‑
输入轴,
9.‑
可旋转地联接到输入轴的太阳轮,
10.‑
能够相对于输入轴旋转并支撑与输入轴同轴的输出轴的行星架,所述行星架包括平行于输入轴延伸的至少一个行星轴,
11.‑
至少一个凸轮,其围绕行星轴定位并且包括与行星轴同心的第一轴向部分和偏心的至少第二轴向部分,
12.所述至少一个行星轴相对于行星架可旋转地安装,和/或所述至少一个凸轮相对于相关的行星轴可旋转地安装,
13.‑
至少一个行星齿轮,其在凸轮的同心第一轴向部分上可旋转地联接至凸轮并且构造为与太阳轮啮合,
14.‑
与输入轴同心定位并包括内齿的外围齿圈,
15.‑
至少一个齿轮,其适于与外围齿圈的内齿啮合,并且包括相对于齿轮的中心偏移的至少一个通孔,并且构造为与凸轮的第二轴向部分相互作用,从而凸轮的旋转使齿轮与外围齿圈正啮合且因此相对于其滚动,齿轮的所述啮合还导致行星架相对于输入轴旋转,
16.并且其中,外围齿圈的以及至少一个齿轮的齿是如在齿轮领域中已知的渐开线齿。
17.根据本发明的一方面,机械减速齿轮包括两个齿轮,并且凸轮包括分别与两个齿轮相关的两个偏心第二轴向部分,其偏心率定位成相对于行星轴在直径上彼此相对。
18.根据本发明的一方面,外围齿圈与至少一个齿轮之间的齿数差为至少三个齿。
19.根据本发明的一方面,外围齿圈包括68个齿,至少一个齿轮包括65个齿。
20.根据本发明的一方面,行星架包括三个行星轴,其构造成分别容纳三个凸轮和三个行星齿轮。
21.根据本发明的一方面,太阳轮包括15个齿,至少一个行星齿轮包括45个齿。
22.根据本发明的一方面,行星架包括轴向地位于至少一个齿轮和行星齿轮的第一侧的第一部分和轴向地位于至少一个齿轮和太阳轮的第二侧的第二部分,第一部分和第二部分通过至少一个行星轴彼此连接。
23.根据本发明的一方面,行星架的第一和第二部分分别经由第一和第二旋转引导装置而相对于输入轴可旋转地安装。优选地,这些旋转引导装置中的每个的类型在滑动轴承和机械滚动轴承之间选择。在特定实施例中,所述第一和第二旋转引导装置分别是机械滚动轴承和滑动轴承。
24.本发明还涉及一种齿轮马达,包括:
25.‑
如上所述的机械减速齿轮,
26.‑
构造成使机械减速齿轮的输入轴旋转的电动马达。
27.根据本发明的一方面,电动马达是无刷电动马达。
附图说明
28.通过以下非限制性示例给出的描述,并参考附图,本发明的其他特征和优点将变得显而易见,其中:
29.‑
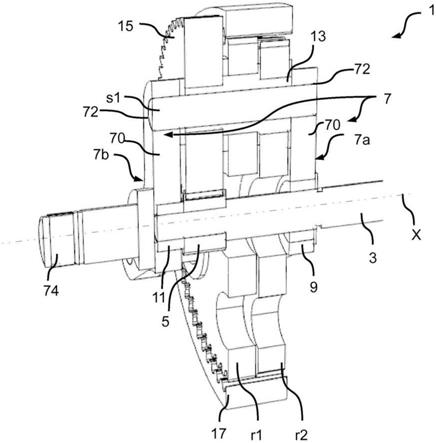
图1示出了根据本发明一实施例的机械减速齿轮的透视截面示意图,
30.‑
图2示出了根据本发明一实施例的减速齿轮的第一侧的透视示意图,
31.‑
图3示出了根据本发明一实施例的减速齿轮的第二侧的透视示意图,
32.‑
图4示出了凸轮的透视示意图,
33.‑
图5示出了根据本发明一实施例的减速齿轮的一部分的透视示意图,
34.‑
图6示出了根据本发明一实施例的齿轮马达的透视截面图。
35.在所有附图中,相同的元件具有相同的附图标记。
具体实施方式
36.以下实施例是示例。尽管描述涉及一个或多个实施例,但这并不一定意味着每个附图标记都涉及同一实施例,或者这些特征仅适用于单个实施例。不同实施例的单个特征也可以组合或互换以提供其他实施例。
37.在下面的描述中,可以为某些元件或参数赋予序数,例如第一元件或第二元件等。在这种情况下,序数仅用于区分并表示相似但不相同的元件,在不脱离本说明书的范围的情况下,这种编号可以容易地互换。同样,在考虑任何给定标准时,此序数编号也不意味着
任何时间顺序。
38.图1示出了根据本发明一实施例的机械减速齿轮1的一部分的剖视图。
39.机械减速齿轮1包括输入轴3或主轴,其构造成沿着与机械减速齿轮1的轴线相对应的轴线x延伸。太阳轮5构造成可绕轴线x可旋转地联接到输入轴3。
40.减速齿轮1还包括行星架7,其构造成使其可绕轴线x相对于输入轴3旋转。
41.例如,行星架7包括:第一部分7a,其通过第一旋转引导装置(在这种情况下是滑动轴承9)围绕输入轴3定位,以及第二部分7b,其通过第二旋转引导装置(在这种情况下是滚动轴承11)围绕输入轴3定位。然而,显然可以设想其他类型和构造的引导装置。图2示出了从行星架7的第一部分7a侧看的机械减速齿轮1的透视图,图3示出了从行星架7的第二部分7b侧看的机械减速齿轮1的透视图。
42.第一部分7a和第二部分7b分别包括例如三个均匀分布的臂70,它们围绕中心部分呈星形延伸。第一部分7a和第二部分7b中的每个的不同臂70彼此例如以120
°
延伸。
43.每个臂70包括轴向开口72,其可以是通孔并且构造成容纳轴的端部。轴向开口72例如位于臂70的端部附近,并且旨在在机械减速齿轮1的组装状态下与轴线x等距定位。行星架7还包括表示为s1、s2、s3的三个行星轴,它们在第一部分7a和第二部分7b之间延伸。更具体地,行星轴s1、s2和s3分别在第一部分7a的一个臂70中的轴向开口72与第二部分7b的一个臂70中的轴向开口72之间延伸,从而三个行星轴s1、s2和s3平行于轴线x延伸并且与轴线x等距定位。行星轴s1、s2和s3可以相对于行星架7可旋转地安装。
44.第二部分7b还包括与输入轴3同轴的输出轴74,其从第二部分7b的中央部分轴向延伸。输出轴74例如与行星架7的第二部分7b一体地形成。
45.机械减速齿轮1还包括三个凸轮13,其构造成使得它们分别围绕三个行星轴s1、s2和s3定位。
46.如果行星轴s1、s2、s3能够相对于臂70旋转,则凸轮13能够可旋转地联接到相应的行星轴(在这种情况下,凸轮13能够与相应的行星轴s1、s2、s3一体形成),或者能够相对于行星轴s1、s2、s3旋转(在这种情况下,行星轴s1、s2、s3可以相对于行星架7固定)。
47.如图4所示,凸轮13包括表示为p1的第一轴向部分,其旨在在机械减速齿轮1的组装状态下与相关的行星轴s1、s2或s3同心并且构造成接收行星齿轮15(在图5中示出了三个行星齿轮15中的两个)。行星齿轮15可旋转地联接到相关的凸轮13。可旋转联接例如通过在轴向部分p1上使用非圆形轮廓以及与行星齿轮15上的轴向部分p1的轮廓互补的形状来实现。行星齿轮15构造成在机械减速齿轮1的组装状态下与太阳轮5啮合。
48.凸轮13还包括第二轴向部分p2和第三轴向部分p3,它们构造成在机械减速齿轮1的组装状态下相对于相关的行星轴s1、s2或s3偏心。第二和第三轴向部分p2、p3例如是圆柱形的。第二轴向部分p2的偏心率与第三轴向部分p3的偏心率相同,但它们的偏心率指向相反的方向,即凸轮13的旋转轴线(对应于行星轴s1、s2或s3)位于连接第二轴向部分p2和第三轴向部分p3的圆柱体中心的部分的中心。
49.机械减速齿轮1还包括外围齿圈17,其包括内齿,并且旨在在机械减速齿轮1的组装状态下围绕凸轮13的第二和第三轴向部分p2、p3并与轴线x同心地定位。
50.机械减速齿轮1还包括第一齿轮r1和第二齿轮r2(特别是在图1中可见)。第一齿轮r1和第二齿轮r2相同,并且其直径小于外围齿圈17的内径。
51.第一齿轮r1包括三个偏心的(相对于齿轮r1的中心)并且平行于轴线x延伸的圆形通孔。第一齿轮r1中的通孔构造成分别接收三个凸轮13的第二轴向部分p2。
52.第二齿轮r2还包括三个偏心的(相对于齿轮r2的中心)并且平行于轴线x延伸的圆形通孔。第二齿轮r2中的通孔构造成分别接收三个凸轮13的第三轴向部分p3。
53.另外,第一齿轮r1和第二齿轮r2构造成与外围齿圈17的内齿啮合。
54.第一齿轮r1和第二齿轮r2还包括中心轴向通孔,其构造成允许输入轴3通过并且齿轮r1、r2绕输入轴3的偏心旋转。
55.凸轮13因此构造成与齿轮r1和r2相互作用,使得凸轮13的旋转引起齿轮r1和r2与外围齿圈17的正啮合。
56.为了令人满意的扭矩传递和可以适用于机械减速齿轮1的不同构造的制造方法,第一和第二齿轮r1和r2的齿以及外围齿圈17的齿是标准渐开线齿。这样的齿可以限制由于零件之间没有滑动而造成的损失,并且可以在限制零件磨损的同时传递高扭矩。另外,如果齿轮r1、r2与不同尺寸的外围齿圈17一起使用,或者如果外围齿圈17与不同尺寸的齿轮r1、r2一起使用,则这些齿不需要重新计算特定的轮廓。
57.图5示出了组件,其包括处于组装位置的输入轴3、行星架7、凸轮13、太阳轮5、三个行星齿轮15中的两个以及两个齿轮之一(在这种情况下为r2)。
58.减速比
59.机械减速齿轮1的减速比由下式给出:
[0060][0061]
其中,z1是太阳轮5的齿数,z2是行星齿轮15的齿数,z3是齿轮r1和r2的齿数,z4是外围齿圈17的齿数。
[0062]
为了便于减速齿轮的组装,太阳轮5和行星齿轮15的齿数优选是行星齿轮15的数的倍数,即在这种情况下是三的倍数。
[0063]
另外,为了实现质量的最佳平衡,齿轮r1、r2的数量至少为两个,齿圈17的齿数是齿轮r1、r2的该数量的倍数,即在这种情况下是二的倍数。
[0064]
另外,选择齿轮r1和r2与外围齿圈17之间的齿数差,使得其是至少三个齿,例如在三个齿与五个齿之间,特别是三个齿,以限制在外围齿圈17的齿和齿轮r1和r2的齿上的应力。
[0065]
为了获得69的减速比,因此可以选择包括15个齿的太阳轮5、包括45个齿的行星齿轮15、包括65个齿的齿轮以及包括68个齿的齿圈17。
[0066]
操作
[0067]
在操作中,输入轴3绕轴线x的旋转导致太阳轮5的旋转,然后旋转三个行星齿轮15。由于行星齿轮15分别可旋转地联接至凸轮13,因此凸轮绕相应的行星轴s1、s2和s3旋转。凸轮13绕行星轴s1、s2和s3的旋转引起第一齿轮r1和第二齿轮r2与齿圈17的正啮合。在机械减速齿轮1的组装状态下,第一齿轮r1与第二齿轮r2在直径上相对地定位,这使得可以获得平衡的运动质量并减小振动(特别是与包括单个齿轮的机械减速齿轮1相比)。
[0068]
第一和第二齿轮r1和r2在外围齿圈17上的旋转还导致包括凸轮13、行星轴s1、s2和s3以及行星架7的组件绕轴线x旋转。当输出轴74位于行星架7上时,以如上所述的输入轴
3的旋转速度与输出轴74的旋转速度之间的减速比获得输出轴74的旋转。因此,机械减速齿轮1包括摆线减速齿轮,其特别由齿轮r1和r2、外围齿圈17、行星架7和凸轮13形成,使得可以在小空间中获得高减速比,特别由太阳轮5、行星齿轮15和行星架7形成的行星齿轮级联接至其,使得可以获得输出轴74的定心的引导的旋转。
[0069]
本发明不限于上述和附图所示的实施例,而是还扩展到包括不同于三个的多个行星齿轮15、不同于两个的多个齿轮r1、r2、以及具有不同齿数的齿轮5、15、齿轮r1、r2或外围齿圈17的实施例。
[0070]
本发明还涉及一种齿轮马达100,其包括如上所述的机械减速齿轮1,其输入轴3构造成由电动马达驱动。
[0071]
图6示出了这种齿轮马达100的实施例的透视截面图。齿轮马达100可以包括保护壳体101。保护壳体101可以是圆柱形的。齿轮马达100可以包括用于引导输入轴3的第一轴承103和用于引导输出轴74的第二轴承105。第一轴承103和第二轴承105可以由滚动轴承(例如球轴承)形成。轴承103、105可以定位在保护壳体101中的专用凹部中。齿圈17也可以固定至保护壳体101。
[0072]
因此,齿轮马达100包括构造成使输入轴3旋转的电动马达110。电动马达110包括可以固定至保护壳体101的定子112。定子112包括例如包括臂116的定子板114,其适于容纳定子绕组以形成线圈118(在图6中示意性示出)。
[0073]
电动马达110还包括转子120,其可旋转地联接到输入轴3,并且包括例如适于与线圈118相互作用的永磁体122(或可替代地,线圈或电磁体),这些线圈118的供电引起与永磁体122的相互作用和转子120的旋转。
[0074]
电动马达110还可以包括可旋转地联接到输入轴3的控制磁体124,以及位置传感器,例如霍尔效应传感器,其构造为确定控制磁体124的位置并因此确定输入轴3的角位置。控制磁体124可以位于输入轴3的端部,并且传感器可以位于面向控制磁体124定位的印刷电路板126上。
[0075]
曲柄130可以安装在机械减速齿轮1的输出轴74上,以将转动扭矩从输出轴74传递到机动车辆的刮水器装置的联动件。
[0076]
电动马达110和机械减速齿轮1因此可以定位在单个保护壳体101中,该保护壳体的直径对应于电动马达110的直径,例如直径小于100mm,特别是在80mm和90mm之间。通过使用轴向长度减小的无刷电动马达110,获得了齿轮马达100,其占地面积是有限的且因此可以容易地安装在机动车辆中,特别是用于驱动刮水器装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1