拆包机的制作方法
[0001]
本发明涉及用于从纤维包中取出纤维絮的拆包机的取出臂,该取出臂具有壳体、分离辊、以及挤压元件,并且本发明涉及拆包机以及使用拆包机从纤维包取出纤维絮的方法。
背景技术:
[0002]
包取出机(bale take-off machine)或拆包机(bale opener)用于从经挤压的纤维包抽取纤维或纤维絮。为此目的,取出单元移动跨过纤维包。取出单元固定到取出臂,该取出臂的高度根据存在的纤维包而设定。取出臂继而安装在取出塔箱(take-off tower)上。取出塔箱允许取出单元移动跨过待剥取的纤维包的表面。为此目的,取出塔箱位于底盘或旋转框架上。通常在轨道上引导的底盘可用于移动跨过成排的包。如果纤维包围绕取出塔箱成圆形布置,则将取出塔箱安装在旋转框架上。当在一个方向上从第一排纤维包抽取纤维或纤维絮并在相反方向上从第二排纤维包抽取纤维或纤维絮时,则存在底盘和旋转架的组合。
[0003]
拆包机位于用于处理纤维材料(例如棉或合成纤维或其混合)的前纺(清花车间)中的生产线的开始处,并且对于前纺中的工序的连续性具有决定性的影响。在拆包机中,通过取出纤维絮而从包中抽取以包的形式递送的纤维材料,并且将纤维材料转移到气动运输系统。气动运输系统通过管线将纤维絮载送到下游的清洗机。
[0004]
在当今通常使用的拆包机中,取出臂安装在取出塔箱上,以便能够竖直地调节。竖直调节的进行凭借在该处取出臂被升高或降低的链驱动、带传动、或轴驱动。
[0005]
提供了多种传感器用于确定取出臂相对于纤维包的表面的位置。包含在取出臂中的取出单元的取出性能取决于取出臂相对于纤维包的表面的位置。
[0006]
从现有技术中已知用于取出臂的并且因此用于取出性能的控制器的多种设计。例如,ep 2 322 701 a1公开了一种拆包机,该拆包机以优选地恒定的取出力控制取出过程。对取出单元的驱动马达的转矩和取出臂的高度调节的转矩进行调整。另外,诸如纤维包的高度和组成的校正因素将加以考虑。这种方法的缺点在于,由于多种部件的调节值,虽然就取出力得出结论,但并不实际上知道该取出力。由于操作条件随时间而改变,或是提供有新的纤维包,在不调整校正因素的情况下,该系统是不可靠的。
[0007]
ep 3 009 539 a1公开了一种拆包机,其中,使用载荷传感器测量取出臂的重量。当取出臂变成搁置在纤维包上时,其重量减轻,或者取出臂甚至会升起。取出臂包含取出单元,通常是一个或多个分离辊连同相关联的驱动单元,这导致取出臂的总重量大于500 kg,即使对于相对小的系统来说也是如此。这种重量上的减小等于在纤维包上的取出臂的支承力。这种设计的缺点是,用于取出臂的升起运动的操作条件在持续的操作期间中发生改变。例如,因为载荷传感器集成到取出臂的升起机构中并且因此也连接到取出塔箱,所以由于取出臂的引导件的磨损或在取出塔箱的底盘中振动的发生,导致了测量误差。
[0008]
另外,由于在现有技术中取出齿到纤维包中的接合深度(即,固定距离)在纤维材
料处理期间是固定的,在硬包(hard bale)的情况下一些纤维材料无法取出;仅邻近格栅接合的辊不能够移除不能被取出齿覆盖并夹持的纤维材料。因此,从一道到另一道在包的表面上形成一些“肋”,这造成不美观的表面,并且接触压力增加,直到由于过载而必须进行新的扫描。
技术实现要素:
[0009]
本发明的目的在于提供具有取出臂的拆包机,该拆包机允许对取出臂进行可靠、直接可控的竖直调节和定位,并且还允许取出距离的自调整,而不受取出臂设计的影响。本发明的目的还在于提供使用拆包机从纤维包可靠可控地取出一定数量的纤维絮的方法。
[0010]
上述目的是通过在独立权利要求的特征部分中的特征实现的。
[0011]
为了实现该目的,提出了用于从纤维包取出纤维絮的拆包机的取出臂的力依赖式竖直调节。取出臂具有:壳体、至少一个具有轴向长度的分离辊、以及挤压元件。挤压元件连接到载荷传感器,并且载荷传感器经由弹性装置连接到壳体。挤压元件固定到载荷传感器、壳体、并且因此固定到取出臂,仅仅依次经由载荷传感器和弹性装置来确保实现这种固定。挤压元件安装在取出臂上,使得当取出臂降低到纤维包上时,挤压元件接触纤维包。当在挤压元件与纤维包的表面初始接触之后,一旦取出臂进一步降低,挤压元件被取出臂的固有重量挤压到纤维包上。因为挤压元件经由载荷传感器和弹性装置连接到取出塔箱的壳体,取出臂的固有重量由于纤维包的支撑而减少的部分经由载荷传感器进行记录(registered)。取出臂通过其作用在纤维包上的接触力可由载荷传感器适当地测量,并且取出距离可由弹性装置自动地调节。已经表明的是,使用四个载荷传感器以补偿倾斜位置是有利的。由于纤维包的表面不形成相对于挤压元件的均匀的或平行的平面,由挤压元件在纤维包上施加的实际支承力并不是在挤压元件上的所有位置上均相等的。然而,当使用多个载荷传感器时,这种情况由评估单元进行补偿,并且可确定独立于取出臂的位置或挤压元件的接触力。另外,通过在挤压元件上直接测量接触力,排除了升起机构的影响或是取出臂的引导件的影响。
[0012]
被称为力变换器(force transducer)的多种设计可被用在载荷传感器中。例如,力变换器的使用是已知的,其中力作用在弹性弹簧体上并使其变形。使用其电阻随着应变改变的应变记,将弹簧体的变形转换为电压上的改变。经由测量放大器记录电压以及因此应变上的改变。该值可基于弹簧体的弹性特性而转换成测量的力值。弯曲梁、环状扭簧、或其他设计被用作弹簧体。在载荷传感器的另一设计中,使用压电陶瓷元件。由于压电材料的有向变形,在压电晶体的晶胞之内形成了微观偶极子。对在晶体的所有晶胞中的相关联电场求和,得出宏观可测量的电压,该电压可转换为测量的力值。载荷传感器是从现有技术中已知的,并且当前广泛使用在力和重量的测量中。
[0013]
挤压元件有利地设计为具有压板的格栅,并且取出单元设计为具有取出齿的分离辊。格栅位于分离辊的下方,并且分离辊与穿过格栅的取出齿接合。安装在分离辊下方的栅格代表与纤维包的表面的实际接触点。在取出塔箱的行进方向上,安装在格栅上的压板用于引导纤维絮,该纤维絮在取出塔箱的行进运动期间并且因此在取出臂的行进运动期间在格栅下方在纤维包的表面上竖起。为此目的,压板被引导成斜向上远离格栅。对于能够在两侧上使用的分离辊,对应的压板安装在格栅的两侧上。压板与栅格一起形成挤压元件。分离
辊的取出齿穿过格栅进行接合,并且由于分离辊的旋转运动而从纤维包的表面抽取纤维絮。因为分离辊的旋转运动,取出齿被纤维包移动,并且因此不帮助在纤维包上支撑取出臂。
[0014]
弹性装置可具有多种设计,例如,液压阻尼器或可变形塑料块。优选地,弹性装置设计为板簧,该板簧的一个端部连接到载荷传感器并且另一个端部经由转换装置连接到壳体,提供该转换装置以调节取出齿的穿透。由于这种设计,取出距离(即取出齿穿过栅格到纤维包中的穿透)是灵活的,并且将由弹性装置自动地调节,而可能的调节距离则分别由弹性装置的刚度或弹簧刚度限制。
[0015]
有利地,止动板布置在壳体上,与连接到载荷传感器的板簧的端部相对,以便使板簧停止并达到最大取出距离。这种设计防止了板簧的过度拉伸并且因此防止了对弹性装置的损坏。
[0016]
有利地,格栅所具有的长度至少对应于分离辊的轴向长度,在该轴向长度上分离辊提供有取出齿。因此,格栅还具有防止取出齿从纤维包撕下过大的纤维絮的功能。格栅的长度以及因此还有压板的长度确保了由格栅和压板形成的挤压元件在分离辊的整个轴向长度上变得搁置在纤维包上。结果是在纤维包的表面上均匀的取出。
[0017]
在一个替代实施形式中,挤压元件设计为引导板。在取出单元的一个设计中,该取出单元所具有的栅格不搁置在纤维包的表面上,引导板代表在取出臂和纤维包之间的接触,并且引导板经由用于测量接触力的载荷传感器适当地连接到取出臂。在这种情况下,格栅仅用于防止取出齿从纤维包撕下过大的纤维絮。
[0018]
在另一替代实施例中,挤压元件设计为多个引导轨道,该引导轨道位于格栅之下并在纤维包上滑动。格栅本身不搁置在纤维包上。引导轨道继而经由载荷传感器和弹性装置顺序安装在取出臂上。必要的压板可固定到引导轨道,以避免由于在纤维包表面上的、进入到分离辊的区域中的纤维絮而导致的接触力的错误测量。引导轨道也可设计为覆盖分离辊的轴向长度的一部分的格栅。在这种情况下,格栅仅在下述位置处提供在引导轨道和分离辊之间,在所述位置处,没有以部分格栅形式的引导轨道位于此处。
[0019]
在另一替代实施例中,挤压元件设计为具有支承护罩的至少一个挤压辊,并且载荷传感器位于挤压辊的支承护罩上,并且弹性装置位于载荷传感器上。代替引导板,挤压辊用于确保在取出单元之下纤维包的表面的进入(run-in)。当取出臂移动跨过纤维包时,挤压辊在取出单元与表面接合之前使纤维包的表面均匀。
[0020]
有利地,用于从纤维包分离金属杂质的磁体安装在挤压元件上。磁体将沿取出单元的整个轴向长度提供在压板上。磁体可作为多个单个的磁体安装,或作为在整个长度上延伸的条状磁体安装。以箔的形式的条状磁体是在现有技术中经常使用的。由于磁体,能够在取出单元上或在后续处理阶段造成损坏的金属杂质可被保留,甚至可在从纤维包中抽取纤维絮之前被保留。可提供磁体的清洁,例如在一排纤维包的端部处。清洁可用手进行或由自动清洁装置进行。当使用条状磁体时,也可以容易地用一块新的已清洁的条替换用过的条。作为磁体条的替代,可使用磁鼓。磁鼓可安装在挤压元件的两侧上,或者还可安装在取出臂上。磁鼓可具有自清洁系统,例如,在取出臂旋转期间,当方向改变时,在远离纤维包的位置上的磁体是非激活的,并以这种方式清洁磁鼓。
[0021]
还提出了具有根据以上描述的取出臂的拆包机。
[0022]
为了实现另外的目标,提出了使用拆包机从纤维包取出纤维絮的方法,该拆包机具有取出臂,该取出臂带有壳体、具有取出齿的至少一个分离辊、以及挤压元件。通过位于挤压元件和壳体之间的载荷传感器的评估,连续地测量取出臂在纤维包上的接触力,并通过位于载荷传感器和壳体之间的弹性装置调节取出齿的穿透。
[0023]
通过使用载荷传感器,可以使取出塔箱以特定压力移动跨过纤维包的表面。取出臂在纤维包上的接触力能够经由载荷传感器来确定。取出齿的穿透通过弹性装置自动地调节。取出臂与固定到取出臂的挤压元件一起降低到纤维包的表面上,直到经由载荷传感器确定一定的载荷。该载荷对应于接触力,凭借该接触力使位于取出臂上的挤压元件挤压到纤维包的表面上。挤压元件挤压到纤维包上所使用的压力、取出单元的状态和工作速度、以及取出塔箱引导取出臂跨过纤维包所使用的行进速度基本上决定了取出数量。拆包机的取出数量现可由接触力的直接测量以及对取出臂的升起机构的相关联的控制直接影响。由于取出操作不能均匀地剥取纤维包,导致在各纤维包之间或在纤维包内产生高度差。如果纤维包表面的水平现在增加,则接触力也增加。这由载荷传感器记录,并且可通过适当地升起取出臂作出响应来进行控制,并且弹性装置可在指定程度内自动地调节挤压元件,从而相应地调节取出齿到纤维包中的穿透。
[0024]
优选地,在0 mm至12 mm的范围内自动地调节穿透。已经显示,自动调节的进一步调节需要在弹性装置的设计中增加投入,而这并没有提供进一步的明显优点。直到12 mm的取出齿的穿透的调节足以实现拆包机的完美操作。
[0025]
通过校准,通过测量由于挤压元件的固有重量而作用在载荷传感器上的力有利地确定接触力的零值。在取出臂的远离纤维包的表面的位置中,通过将挤压元件固定到取出臂的壳体上,挤压元件的固有重量使载荷传感器置于载荷下。如果现在将取出臂降低到纤维包上,则初始减轻了载荷传感器的载荷,减轻的大小为挤压元件的固有重量。然而,载荷的减轻导致在纤维包的表面上的压力,在确定支承压力时须考虑到这一点。
附图说明
[0026]
下面基于示例性实施例并参考附图更详细地解释本发明,附图示出了以下内容:图1在正视图中示出了拆包机的示意图;图2在俯视图中示出了拆包机的示意图;图3在局部视图中示出了根据本发明的取出臂的第一实施例的示意图;图4示出了根据图3的在位置x-x处的示意性截面图;图5在局部视图中示出了根据本发明的取出臂的第二实施例的示意图;以及图6示出了根据图5的在位置y-y处的示意性截面图。
具体实施方式
[0027]
图1和图2示出了根据现有技术的拆包机1的示意图,该拆包机1用于从纤维包2取出纤维絮10。图1在正视图中示出了拆包机1,并且图2在俯视图中示出了拆包机1。拆包机1基本上由取出塔箱3和取出臂6组成。取出臂6固定到取出塔箱3的一侧,并自由地伸出跨过纤维包2。取出塔箱3配备有底盘4。取出塔箱3凭借底盘4在轨道5上沿纤维包2移动。因为这种移动12,安装在取出塔箱3上的取出臂6被引导跨过纤维包2的表面。取出单元7位于取出
臂6中。该取出单元7从纤维包2移除纤维絮10。纤维絮10被取出臂6和取出塔箱3带到输送通道8。输送通道8处于一定的负压下,并且因此从取出单元7到输送通道8的运输路径也处于一定的负压下,所述负压用于将纤维絮10从取出单元7通过输送通道气动地输送到气动纤维絮运输系统14中。输送通道8在取出塔箱3与纤维絮运输系统14之间被通道盖9闭合。在取出塔箱3的行进运动12期间,通道盖9不时滚动(rolled on and off),由此输送通道8在其有效长度上被通道盖9闭合,该输送通道8的有效长度由于取出塔箱3的行进运动12而连续改变。
[0028]
取出臂6到取出塔箱3的固定具有高度可调节的设计,使得可连续地剥取纤维包2。取出臂3的移动13用于保证从纤维包2的表面均匀地取出纤维絮10。当取出塔箱3通过其行进运动12已经行进跨过所有纤维包2时,取出塔箱3的行进运动12的方向可反转。当在输送通道8的两侧提供纤维包2以便取出时,因为旋转运动11,取出塔箱可将取出臂6转至输送通道9的另一侧。
[0029]
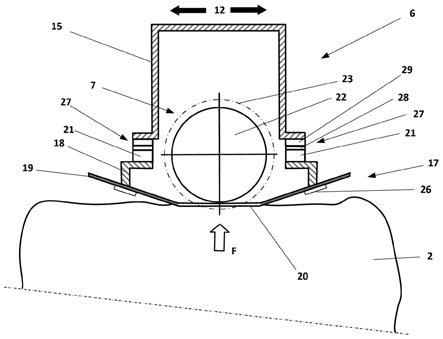
图3在局部视图中示出了根据本发明的取出臂6的第一实施例的示意图,并且图4示出了根据图3的在位置x-x处的示意性截面图。取出臂6具有壳体15和位于壳体15内的取出单元7。取出单元7(设计)为分离辊22,该分离辊22具有轴向长度16并且在轴向长度16上带有位于其表面上的取出齿23。取出齿23可设计为单个的齿,或呈带齿的盘的形式。挤压元件17由安装架(mounting)18、压板(hold-down plate)19、和格栅(grid)20组成,该挤压元件17位于壳体15的下方。挤压元件17的长度超过分离辊22的轴向长度16,以便在纤维包2的整个范围内恰当地行进跨过纤维包2。基于在图1和2中示出的拆包机1的设计,分别示出了压板19对应于在格栅20的两侧上的可能的行进运动12。压板19连接到格栅20,并与格栅20一起安装在安装架18上。安装架18继而固定到载荷传感器21,载荷传感器21紧固到弹性装置27,并且弹性装置27固定到取出臂6的壳体15。因此,挤压元件17仅仅依次经由载荷传感器21和弹性装置27联接到取出臂6的壳体15,而没有另外的连接。图4还示出了待剥取的纤维包2,取出臂6经由挤压元件17向该纤维包2施加接触力f。由于纤维包2的不规则高度,接触力f在挤压元件17的整个表面区域上不一定是均匀分布的。然而,接触力f的不均匀分布由四个载荷传感器21的布置补偿。接触力f越大,待剥取的纤维包2的上部分被压挤得越严重,并且通过分离辊22的取出齿23与纤维包2的接合而实现的取出性能越高。取出齿23到纤维包2中的实际穿透深度由搁置在纤维包的表面上的栅格20确定。为了调节取出齿23到纤维包2中的接合深度,需调节在格栅20和分离辊22之间的距离,即取出距离。这是通过弹性装置27实现的,每个弹性装置设计为板簧28,该板簧28的一个端部连接到载荷传感器21,并且另一个端部经由转换装置29连接到壳体15,该转换装置29被提供以调节取出齿23的穿透。转换装置29可设计为标尺(scale),标尺可设定范围,该范围例如0-20 mm,优选地0-12 mm,在该范围内,当搁置在纤维包2的表面上时,挤压元件17与载荷传感器21一起可自动地上下调节,因此取出齿23到纤维包2中的穿透得到调节,并且从而避免了不美观的包表面。
[0030]
图4还示出了在压板19上的用于分离金属颗粒的磁体26。位于纤维包2的表面上的金属颗粒被磁体保留,并且因此不进入取出齿23的区域。
[0031]
图5在局部视图中示出了根据本发明的取出臂的第二实施例的示意图,并且图6示出了根据图5的在位置y-y处的示意性截面图。取出臂6具有壳体15和位于壳体15内的取出单元7。取出单元7(设计)为分离辊22,该分离辊22具有轴向长度16并且带有位于其表面上
的取出齿23。取出齿23可设计为单个的齿,或呈带齿的盘的形式。挤压元件17由安装在支承护罩25中的挤压辊24和位于壳体15下方的格栅20组成。挤压元件17的长度超过分离辊22的轴向长度16,以便在纤维包2的整个范围内恰当地行进跨过纤维包2。基于在图1和2中示出的拆包机1的设计,分别示出挤压辊24对应于在格栅20的两侧上的可能的行进运动12。格栅20类似地安装在支承护罩25上。支承护罩25继而固定到载荷传感器21,载荷传感器21固定到弹性装置27,并且弹性装置27紧固到取出臂6的壳体15。因此,挤压元件17仅仅依次经由载荷传感器21和弹性装置27联接到取出臂6的壳体15,而没有另外的连接。图6还示出了待剥取的纤维包2,取出臂6经由挤压元件17和挤压辊24向该纤维包2施加接触力f。由于纤维包2的不规则高度,接触力f在两个挤压辊24上或在其轴向长度上不一定是均匀分布的。然而,接触力f的不均匀分布由四个载荷传感器21的布置补偿。接触力f越大,待剥取的纤维包2的上部分被挤压辊24压挤得越严重,并且通过分离辊22的取出齿23与纤维包2的接合而实现的取出性能越高。取出齿23到纤维包2中的实际穿透深度由搁置在纤维包2的表面上的栅格20确定。为了调节取出齿23到纤维包2中的接合深度,需调节在格栅20和分离辊22之间的距离,即取出距离。这是通过弹性装置27实现的,每个弹性装置设计为板簧28,该板簧28的一个端部连接到载荷传感器21,并且另一个端部经由转换装置29连接到壳体15,该转换装置29被提供以调节取出齿23的穿透。转换装置29可设计为标尺,该标尺可设定范围,该范围例如0-20 mm,优选地0-12 mm,在这种范围内,当搁置在纤维包2的表面上时,挤压元件17与载荷传感器21一起可自动地上下调节,因此取出齿23到纤维包2中的穿透得到调节,并且从而避免了不美观的包表面。
[0032]
附图标记列表1拆包机2纤维包3取出塔箱4底盘5轨道6取出臂7取出单元8输送通道9通道盖10纤维絮11取出塔箱的旋转运动12取出塔箱的行进运动13取出臂的移动14纤维絮运输系统15壳体16取出单元的轴向长度17挤压元件18安装架19压板
20格栅21载荷传感器22分离辊23取出齿24挤压辊25支承护罩26磁体27弹性装置28板簧29转换装置30止动板f接触力
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1